Автоматическая подборка драйверов виндовс виста
Программа представляет собой универсальный пакет под управлением оболочки DRP. DriverPack Solution автоматически подбирает и устанавливает необходимые драйвера в вашу ОС. Последняя версия отлично подходит для записи на DVD-диск, что дает возможность носить ее как универсальный пакет драйверов. В отличие от многих аналогов, пакет не нуждается в подключении к Интернету и уже имеет все необходимые драйвера. Пакет очень упрощает переустановку Windows. Поиск драйверов и установка осуществляются за несколько кликов.
DriverPack Solution подходит для Windows 7,8,XP, а новая версия удивит вас рядом дополнительных функций, оптимизированных под Windows 8.
Возможности:
- автоматический подбор и установка компонентов;
- наличие собственной базы, исключающей необходимость подключения к Интернету;
- работа с 64-разрядными ОС;
- установка драйверов осуществляется прямо с HDD /DVD/флешки;
- установка дополнительного ПО;
- возможность добавления своих пакетов драйверов в базу программы.

Принцип работы:
как вы уже поняли, DriverPack Solution — это универсальный менеджер, который можно скачать бесплатно на русском языке. Для начала программа выполняет сканировании системы и установку стандартного пакета драйверов. Программа имеет понятный интерфейс, она выводит на экран данные о вашей ОС и предлагает варианты по оптимизации ее работы.
Использование DriverPack Solution рассчитано даже на самых неопытных пользователей, здесь поэтапно предлагается определить сами драйвера, скачать, установить новые или обновить уже имеющиеся комплекты. Хоть подключение к Интернету и не требуется, периодически рекомендуется делать обновления, чтобы всегда иметь свежие версии драйверов.
Драйверпак Солюшн уже содержит все необходимые пакеты, находящиеся в zip-архивах и упорядоченные по различным типам оборудования. Что примечательно, пакет может устанавливать и дополнительное программное обеспечение, к примеру, браузеры или кодеки. Кроме этого, есть возможность скомпоновать пакет для конкретного ПК для дальнейшего упрощения установки, переустановки, обновления..png)
Плюсы:
- не требует доступа в Интернет;
- распространяется свободно;
- понятный русский интерфейс;
- наличие всплывающих подсказок и «горячих клавиш»;
- стабильная, надежная, быстрая.
Минусы:
- редкие обновления.
DriverPack Solution — удобное решение для всех конфигураций оборудования. Программа может быстро и, главное, бесплатно скачать драйверы на сетевые и звуковые карты, материнские и системные платы, видеокарты, модемы, Wi-Fi адаптеры.
Для того, чтобы новичкам не углубляться в процесс самостоятельного поиска драйверов для своего компьютера и их установки, всегда можно попробовать установить драйвера автоматически! О том, что такое драйвера, для чего они нужны и общие рекомендации по их установке вы сможете найти в отдельной статье «Что такое драйвера и как быть, если они не установлены на компьютер? ». В статьях, которые я писал ранее, рассказывалось о ручном поиске и установке драйверов на ноутбуки / купленные готовые к работе стационарные компьютеры и на компьютеры, собранные из отдельно-приобретённых комплектующих.
В этой статье я расскажу о ещё одном способе установить драйвера — при помощи программы DriverPack Solution, которая содержит у себя в базе огромное количество драйверов на разное «железо» компьютера и позволяет быстро установить всё, чего не хватает в вашей системе.
Подобная программа ни одна в своём роде. Я встречал и платные, и бесплатные. DriverPack Solution является полностью бесплатной программой! Все подобные программы по своему принципу работы аналогичны, но могут содержать в своей базе разное количество драйверов. Для разбора в статье я выбрал именно DriverPack Solution за свою бесплатность и потому что, является наиболее популярной.
Рассмотрим, как установить Driverpack Solution и как ей пользоваться.
Обратите внимание!
Если вы более-менее опытный пользователь компьютера, то я не рекомендую устанавливать драйвера автоматически при помощи каких-либо программ. Во-первых, такие программы могут установить не совсем совместимые драйвера, а во-вторых, не совсем актуальные (т.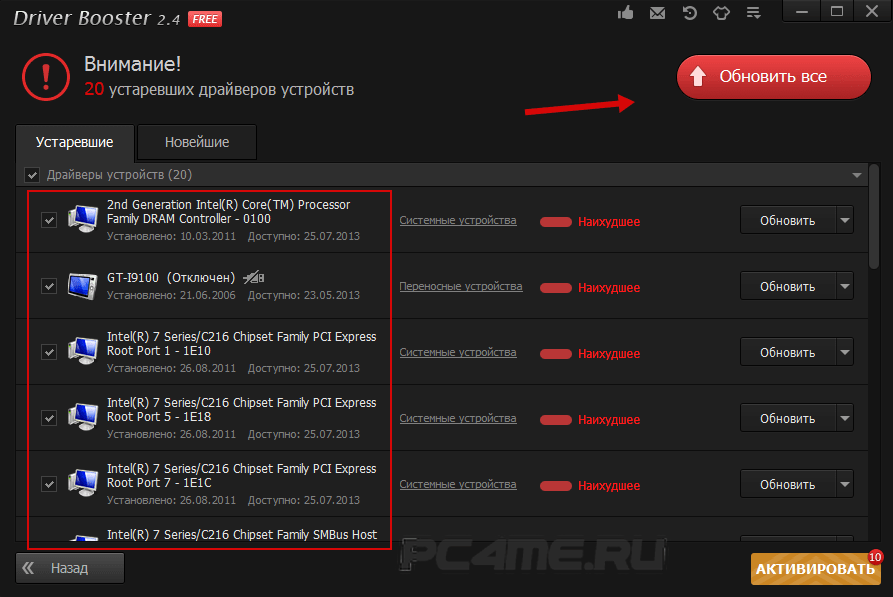 е. самые новые). Самый лучший вариант – это установить драйвера вручную, скачав их с официальных сайтов производителей компьютеров или отдельных устройств. О ручной установке я писал отдельные статьи, которые вы можете открыть по ссылкам из первого абзаца. Однако для новичков подобные автоматические программы могут очень облегчить жизнь.
е. самые новые). Самый лучший вариант – это установить драйвера вручную, скачав их с официальных сайтов производителей компьютеров или отдельных устройств. О ручной установке я писал отдельные статьи, которые вы можете открыть по ссылкам из первого абзаца. Однако для новичков подобные автоматические программы могут очень облегчить жизнь.
Как загрузить и установить DriverPack Solution для автоматической установки драйверов!
Drp.su
У данной программы имеется 2 версии:
DriverPack Online . Данная версия DriverPack Solution имеет размер всего 2 Мб и предназначена для обновления драйверов через интернет. Т.е., если у вас на компьютере уже имеется выход в интернет (установлен драйвер на сетевые карты), вы можете скачать эту версию и автоматически установить все недостающие драйвера через интернет.
DriverPack Full . Эта версия DriverPack Solution имеет размер аж около 10. 2 Гб. Отличие в том, что эта версия предназначена для обновления драйверов без подключения к интернету, поскольку в архиве с программой уже будут иметься все драйвера из базы. От этого и размер версии такой огромный. Использовать эту версию имеет смысл, если у вас на компьютере нет подключения к интернету, например, как раз из-за неустановленных драйверов на сетевую карту.
2 Гб. Отличие в том, что эта версия предназначена для обновления драйверов без подключения к интернету, поскольку в архиве с программой уже будут иметься все драйвера из базы. От этого и размер версии такой огромный. Использовать эту версию имеет смысл, если у вас на компьютере нет подключения к интернету, например, как раз из-за неустановленных драйверов на сетевую карту.
Пролистав сайт программы немного вниз, увидите таблицу, где сравниваются 2 версии программы DriverPack Solution и имеются кнопки скачивания под каждой:
Если у вас выход в интернет на компьютере есть, скачивайте DriverPack Online, нажав кнопку «СКАЧАТЬ. exe». Скачивание начнётся сразу же и программу можно будет запустить обычным образом.
Полную версию программы (DriverPack Full) скачивайте только в том случае, если выхода в интернет на компьютере не имеется. Соответственно, скачивать программу в таком случае нужно через другой компьютер и затем копировать её на целевой. Для скачивания этой версии нажмите «СКАЧАТЬ torrent».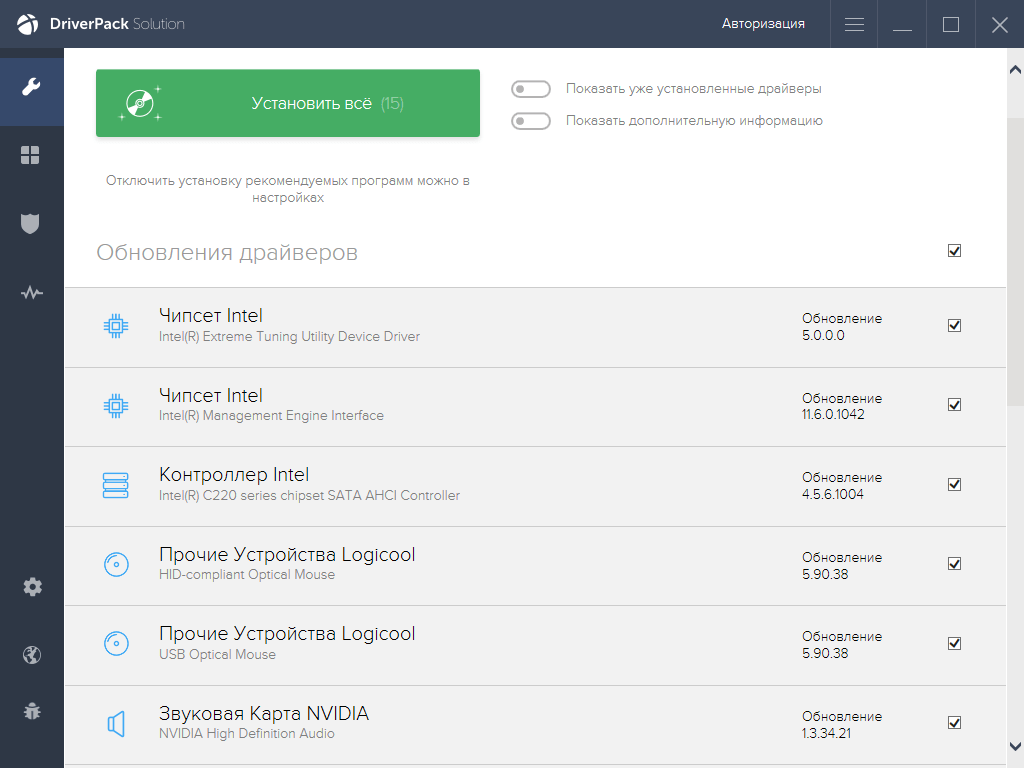 Учтите, что скачается не сама программа, а специальный файл малого размера. Этот файл служит для загрузки самой программы через так называемый торрент трекер. Чтобы скачать саму программу, вам потребуется установить ещё одну, например, «uTorrent». Подробнее о скачивании программ через торрент трекеры рассказано в отдельной статье:
Учтите, что скачается не сама программа, а специальный файл малого размера. Этот файл служит для загрузки самой программы через так называемый торрент трекер. Чтобы скачать саму программу, вам потребуется установить ещё одну, например, «uTorrent». Подробнее о скачивании программ через торрент трекеры рассказано в отдельной статье:
Для начала рассмотрим, как пользоваться DriverPack Solution на примере облегчённой версии, работающей через интернет – DriverPack Online.
Автоматическая установка драйверов при помощи DriverPack Online
После того, как программа скачается, запускаем её:
Установки эта версия не требует.
Программа запустится и будет предложено 2 варианта установки драйверов через DriverPack Solution: автоматически и ручной. Я не рекомендую нажимать кнопку «Установить автоматически», потому как в таком случае программа автоматически может установить и всё что требуется и в добавок ещё то что вам не требуется, например, нужные по мнению сервиса программы для вашего компьютера (какой-нибудь браузер, архиватор, проигрыватель и прочее). Лучше нажать кнопку «Установить вручную», чтобы у вас была возможность выбрать то, что необходимо установить из DriverPack Solution:
Лучше нажать кнопку «Установить вручную», чтобы у вас была возможность выбрать то, что необходимо установить из DriverPack Solution:
Откроется окно с 2-мя вкладками: «Драйверы» и «Софт». Для начала открываем первую вкладку и видим в ней список всех драйверов, которых не хватает в вашей системе, либо которые уже устаревшей версии и требуют обновления. В этой вкладке я рекомендую отметить галочками все драйвера, чтобы установить из DriverPack Solution всё что необходимо в вашу систему + обновить устаревшие версии. Выбрав из списка все драйвера, нажмите внизу кнопку «Установить драйверы»:
Сразу начнётся процесс загрузки нужных драйверов из интернета. Это займёт несколько минут:
После загрузки начнётся установка драйверов. Это займёт около 10-20 минут.
Иногда при установке драйверов вы можете получить вот такое сообщение:
В таком случае нажимайте «Всё равно установить этот драйвер», поскольку ничего страшного нет, в том, что издателя драйвера не опознала система.
После того, как процент установки DriverPack Solution дойдёт до 100%, следует проверить, все ли драйвера установились. Как это сделать рассказано в отдельной статье .
Во вкладку «Софт» в программе DriverPack Solution можно даже не заходить. Там будут основные, наиболее часто используемые и популярные программы для компьютера, которые вы также можете установить из DriverPack Solution в автоматическом режиме:
Ещё я не упомянул назначение кнопки «Установить всё». Эта кнопка предназначена для установки из DriverPack Solution сразу и драйверов, которые вы выбрали на вкладке «Драйверы» и программ, которые вы могли выбрать на вкладке «Софт».
Стоит отметить, что на моём личном опыте, через Онлайн версию DriverPack Solution может обнаруживаться и устанавливаться меньшее количество драйверов, чем через полную версию программы – DriverPack Full. Поэтому сейчас рассмотрим как пользоваться полной версией DriverPack Solution.
Как пользоваться полной версией DriverPack Solution («DriverPack Full») для автоматической установки драйверов!
Данная версия программы чаще устанавливает все необходимые драйвера чем аналогичная сокращённая версия. Например, при попытке установить драйвера при помощи версии DriverPack Online у меня не установился один драйвер (для чипсета) но зато этот драйвер установился через полную версию программы – DriverPack Full. Рассмотрим, как пользоваться Driverpack Solution в полной версии.
Загруженная на компьютер полная версия программы DriverPack Solution – Full, представляет собой файл ISO большого размера (около 10.2 Гб). Чтобы открыть этот файл проделайте следующее:
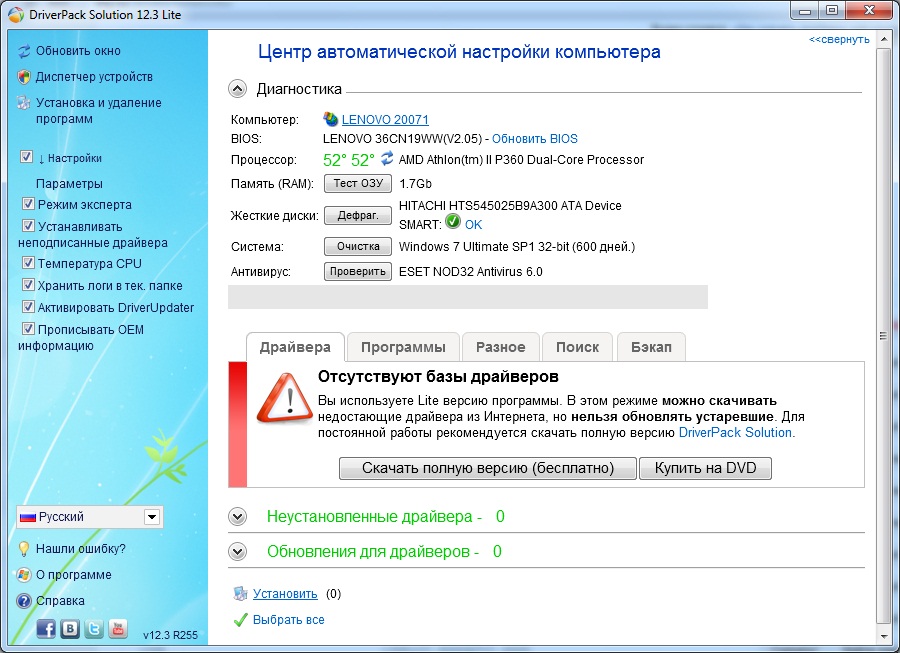
Когда программа DriverPack Solution запустится, ей потребуется ещё пара минут, чтобы собрать сведения об устройствах вашего компьютера и показать, какие драйвера не установлены, а для каких имеются обновления. Откройте вкладку «Драйвер». Ниже отобразятся неустановленные драйвера и те драйвера, для которых имеются более новые версии.
Откроется новое окно, где нужно отметить пункт «Установить драйверы» и далее отметить галочками все предлагаемые драйверы. Далее внизу поставьте 2 галочки (см.пункт 2 на изображении ниже), чтобы принять лицензионное соглашение при установке драйверов и для того, чтобы Windows создала контрольную точку восстановления.
Контрольная точка восстановления – это так называемый «снимок» текущего состояния Windows. Это позволяет, в случае если с системой что-то пойдёт не так, восстановить её до предыдущего состояния (на момент, когда была создана контрольная точка).
И затем нажимаем «Начать установку»:
Начнётся процесс установки недостающих драйверов и обновление устаревших:
Процесс занимает разное количество времени. Всё зависит от того, сколько драйверов у вас не установлено, сколько требуют обновлений и, конечно же, от производительности вашего компьютера. Может затянуться минут на 20, а иногда и дольше.
Во вкладку «Программы» опять же можно и не заходить. Об этом я уже писал . Здесь вам предлагается установить самые необходимые программы для компьютера или обновить уже имеющиеся:
Об этом я уже писал . Здесь вам предлагается установить самые необходимые программы для компьютера или обновить уже имеющиеся:
Напомню, что программы лучше устанавливать вручную, скачивая их самостоятельно с официальных сайтов!
Сейчас мы рассмотрели, как пользоваться полной версией Driverpack Solution – DriverPack Full.
В программе ещё имеется более продвинутый режим, в котором отображается больше настроек. Это режим эксперта. Включить его можно, отметив в левой части окна опцию «Настройки» и затем «Режим эксперта»:
Там же вы видите опцию «Сохранять логи на диске». Эта функция обычным пользователям вряд ли когда-то пригодится. Она позволяет сохранять на компьютер специальные файлы с отчётами о результатах установки и обновлений.
После включения режима эксперта, напротив каждого драйвера появится 3 кнопки:
Слева направо эти кнопки значит: автоматическая установка драйвера, ручная установка драйвера, скачать драйвер из интернета. Ручная установка позволяет отобразить процесс установки драйвера, а при выборе 3-й функции, вы можете просто скачать файл драйвера вручную из интернета, чтобы затем продолжить установку. С автоматической установкой, думаю, всё ясно: нажали кнопку и драйвер полностью сам установился, не выдавая вам никаких сообщений и ничего не спрашивая:)
С автоматической установкой, думаю, всё ясно: нажали кнопку и драйвер полностью сам установился, не выдавая вам никаких сообщений и ничего не спрашивая:)
Вот такой принцип использования программы DriverPack Solution. Ничего сложного нет, но и следует понимать, что программа, к сожалению, не всегда устанавливает все драйвера. Например, на один из ноутбуков (Asus N75S), где я проводил эксперимент по установке драйверов, не хотел устанавливаться драйвер на чипсет при помощи Онлайн версии программы – DriverPack Online. Он установился через полную версию программы. Но зато драйвер для видеокарты не установился ни через одну из версий. Конечно, судя различным отзывам, такие проблемы встречаются не особо часто. Чаще программа всё же находит и устанавливает все драйвера.
Эта программа отлично подходит для новичков, кто ещё не умеет только пользоваться интернетом и тем более не сможет самостоятельно найти и установить нужные драйвера.
Помимо рассмотренной в этой статье программы DriverPack Solution имеются ещё и другие, например, «Carambis Driver Updater». Вероятно, в одной из статей в будущем я разберу ещё одну программу, предварительно её протестировав. Если она окажется эффективней чем DriverPack Solution, то выпущу по ней статью.
Вероятно, в одной из статей в будущем я разберу ещё одну программу, предварительно её протестировав. Если она окажется эффективней чем DriverPack Solution, то выпущу по ней статью.
На этом всё… Думаю по этой статье каждый новичок сможет установить и понять как пользоваться DriverPack Solution для автоматической установки драйверов. Хорошего вам дня и настроения! Пока;)
Внизу этой страницы есть возможность бесплатно скачать DriverPack Solution Full через торрент или Online-версию с оф. сайта от разработчика Артура Кузякова (Artur Kuzyakov). Кросплатформенность программы ограничена поддержкой ОС Майкрософт Виндовс 10, 8.1, 8, 7, Vista, XP, как 32-бит, так и 64-битных версий. Позитивные оценки в отзывах и комментариях в социальных сетях, на форумах и многих Интернет-ресурсах, а также рекомендации, как правильно скачать DriverPack Solution бесплатно для Windows XP, Vista, 7, 8, 8.. Постоянная ссылка: сайт/ru/drivers/drps
Как происходит обновление без DriverPack Solution
В операционной системе Microsoft Windows служба, отвечающая за обновление установленных драйверов, а соответственно, за стабильность, производительность, быстродействие и аппаратную безопасность системы, в силу низкой функциональности, мягко говоря, не справляется с ожиданиями пользователей.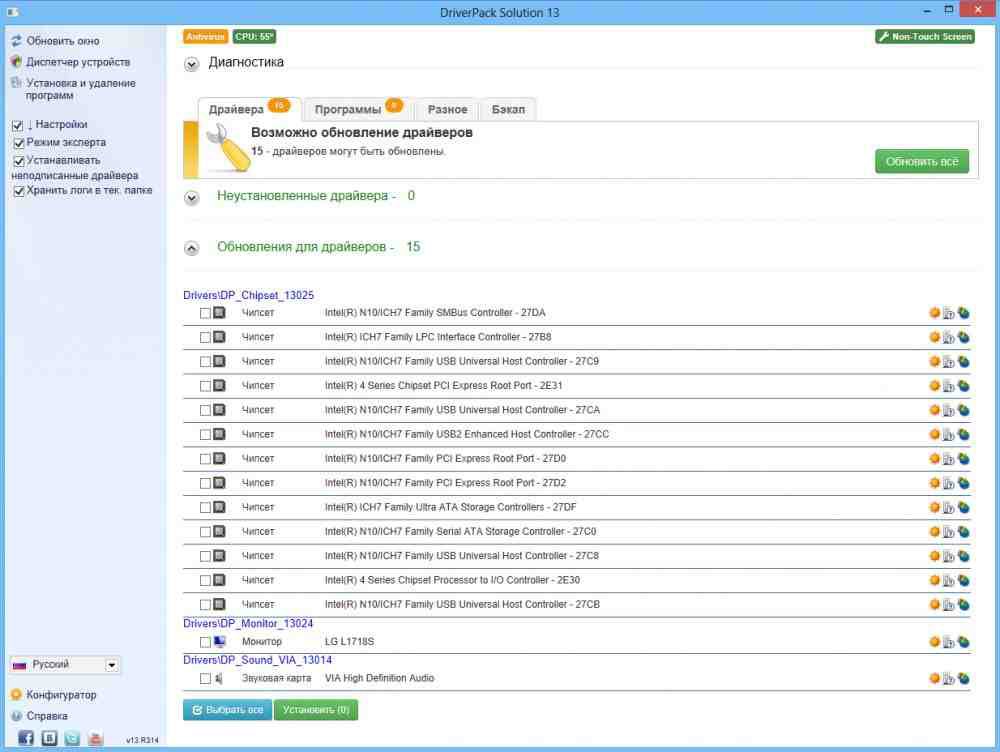 Выйти из ситуации можно несколькими способами. Например, посетив официальный сайт драйверов производителя оборудования, или универсальный независимый сайт «дров» для любого компьютерного оборудования, и найдя там все необходимое.
Выйти из ситуации можно несколькими способами. Например, посетив официальный сайт драйверов производителя оборудования, или универсальный независимый сайт «дров» для любого компьютерного оборудования, и найдя там все необходимое.
В большинстве случаев не просто обойтись без удобной и функциональной программы для драйверов, работающей автоматически или полуавтоматически. Рекомендуем скачать Драйвер Пак Солюшен Онлайн для Виндовс 7, 8, 8.1, 10, а также Vista и XP SP 3 (32-бит и 64-бит) или полную торрент-версию через официальный сайт. Эта программа выступает альтернативным решением встроенному Диспетчеру устройств ОС Виндовс и решает проблемы с драйверами посредством точного распознавания комплектующих и периферийного оборудования.
Краткий обзор DriverPack Solution
Драйвер Пак Солюшен лучше других справляется с поиском, установкой или обновлением драйверов для поддержания и контроля нормальной работы компьютерного оборудования. ДрайверПак Солюшен успешно будет работать на персональном компьютере, ноутбуке или нетбуке.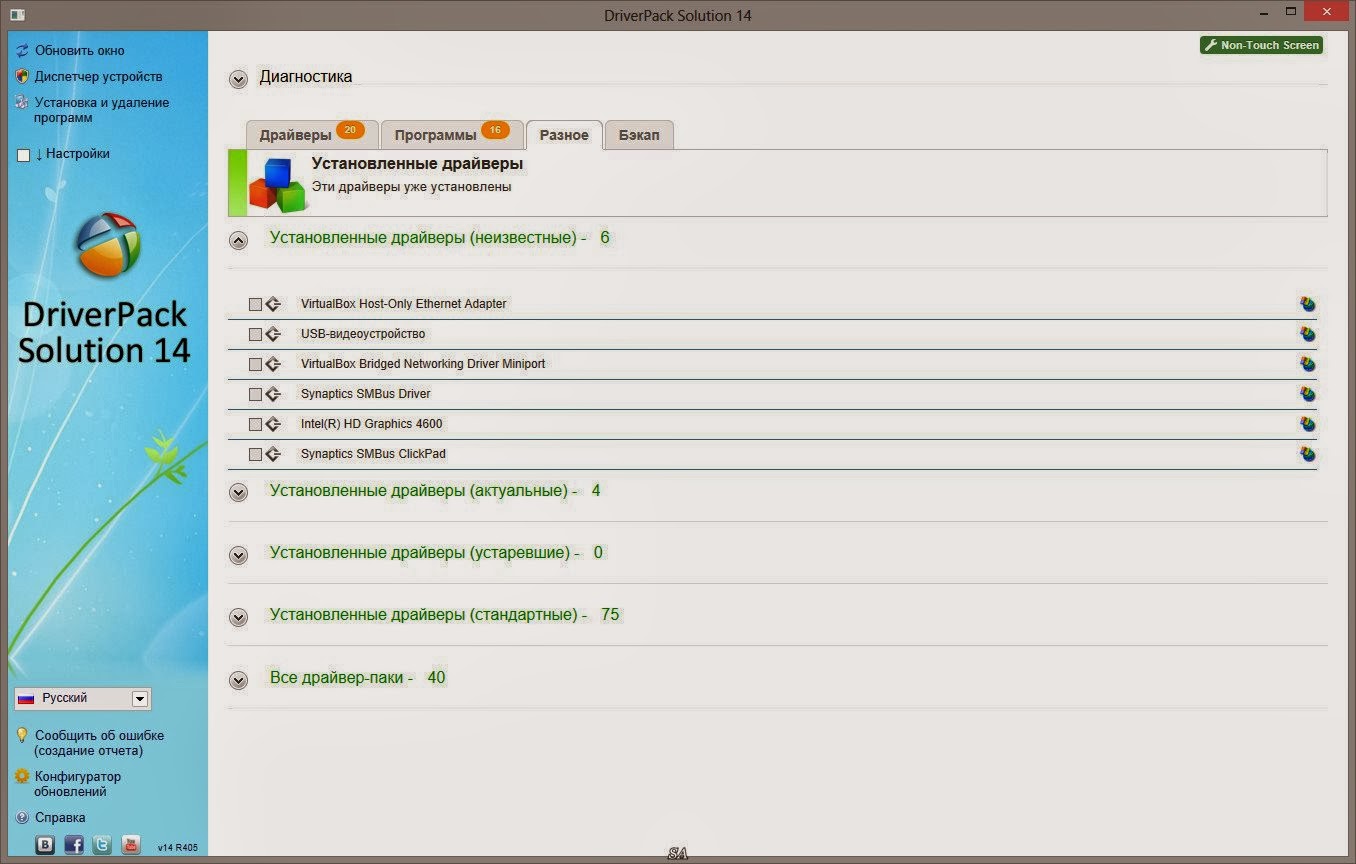 Свободно распространяемое под GNU General Public License с открытым исходным кодом заключает в себе ряд технологических инноваций. Кроме того, с 2010 года имеет в Российской Федерации свидетельство о госрегистрации программы для ЭВМ.
Свободно распространяемое под GNU General Public License с открытым исходным кодом заключает в себе ряд технологических инноваций. Кроме того, с 2010 года имеет в Российской Федерации свидетельство о госрегистрации программы для ЭВМ.
Программный продукт состоит из интерфейса для установки и базы данных, которая сформирована из наборов пакетов, так называемых, драйверпаков. В принципе, программа в 2008 году так и называлась «Интерфейсом для установки», а позднее «Driver Pack Autorun», после чего автор остановился на современном наименовании DriverPack Solution. Драйверпаки сгруппированы в виде каталога устройств согласно категории. Безусловно, сегодня стоит получить обновленный движок, интерфейс и базы, если последний Драйвер Пак Солюшен скачать бесплатно торрент через официальный сайт, не покидая сайт сайт без лишних усилий.
В свежей базе от Артура Кузякова и его команды найдутся последние версии ПО для работы материнских, PCIE, AGP, PCI плат, портов и внешних устройств. Есть смысл воспользоваться данным ПО, чтобы бесплатно скачать драйвера для видеокарт ATI Radeon, NVIDIA GeForce и других; для многофункциональных устройств, сканеров, принтеров HP LaserJet, HP DeskJet, Epson, Samsung, Canon и других; для HD и AC97 звуковых карт Realtek, Creative, E-MU, CMedia, Analog Devices SoundMAX, Intel, SiS, Via и других производителей. А также для различных мониторов, Web-камер, мультимедиа клавиатур, геймпадов, многокнопочных мышек и другого оборудования. Программа автоматически подберет, загрузит и установит любой USB, HDD, IEEE 1394 (FireWire, i-Link), WiFi, Bluetooth, сетевой драйвер для быстрой и беспроблемной коммуникации.
А также для различных мониторов, Web-камер, мультимедиа клавиатур, геймпадов, многокнопочных мышек и другого оборудования. Программа автоматически подберет, загрузит и установит любой USB, HDD, IEEE 1394 (FireWire, i-Link), WiFi, Bluetooth, сетевой драйвер для быстрой и беспроблемной коммуникации.
Не обойдены вниманием DriverPack Solution ноутбуки и нетбуки. Практически для всех популярных моделей известных производителей созданы драйверпаки. В числе поддерживаемых — устройства от Acer, Asus, DELL, Hewlett Packard, Lenovo, MSI, Samsung, Sony и других производителей. Такие пакеты содержат последние версии всего самого необходимого для ноутбука или нетбука.
Работа с Internet и когда Интернета нет
Рекомендуем скачать DriverPack Solution торрент Offline или Online Lite версии для Windows 7, 8, 8.1, 10, а также Vista и XP SP 3 (32-bit и 64-bit), который прекрасно подойдет для периодических проверок с целью поиска устаревших, неправильных и некорректных, закачки и обновления драйверов из своей онлайн-базы. Также программа окажется полезной при первой установке или переустановке операционной системы Виндовс на компьютер, ноутбук или нетбук.
Также программа окажется полезной при первой установке или переустановке операционной системы Виндовс на компьютер, ноутбук или нетбук.
Запуск Интернет-сервисa DevID Online внес важные изменения в функционал, оснастив менеджер инновационными инструментами поиска неизвестных программе драйверов. Обычно, после обновления онлайн, для принятия произведенных изменений требуется перезагрузка компьютера, к этому стоит быть готовым, заранее сохранив данные и выйдя из приложений.
Часто на компьютере, где устанавливается, переустанавливается или обновляется операционная система отсутствует Интернет. В этом случае DriverPack Solution Full придется как нельзя кстати. Он позволяет, используя свою мощную и объемную оффлайн базу, установить или обновить все необходимое на компьютере без Интернета.
Интерфейс, мультиязычность и функционал DriverPack Solution
Продуманный и понятный даже для неподготовленного пользователя интерфейс программы на русском языке позволяет, не затрачивая времени на знакомство с программой и изучение ее возможностей и многообразия настроек, тотчас приступить к работе. Даже неопытные пользователи легко смогут бесплатно скачать драйвера через Драйвер Пак Солюшен для компьютера, ноутбука, нетбука с официальных сайтов.
Даже неопытные пользователи легко смогут бесплатно скачать драйвера через Драйвер Пак Солюшен для компьютера, ноутбука, нетбука с официальных сайтов.
К интерфейсным достоинствам ДрайверПэк Солюшн относятся:
Прогресс-бар в реальном времени,
— инфо-блок в виде всплывающих подсказок,
— хоткей для ускоренного управления,
— мощная система формирования отчетов.
Мультиязычность с интеллектуальной морфологией языков бьет многие рекорды, а количество языков интерфейса DriverPack Solution перешагнуло планку нескольких десятков языковых пакетов, что не часто встречается у конкурентов.
Среди конкурентов ДрайверПак Солюшн с похожими функциональными возможностями следует выделить Driver Booster, DriverMax и DriverEasy, однако ни одна из этих бесплатных программ не работает оффлайн без Интернета. DriverPack Solution умеет все нужное и даже больше:
Самостоятельно распознает оборудование и подбирает новейшее ПО,
— имеет понятный интерфейс на русском языке со всплывающими подсказками,
— обладает необходимым функционалом для настройки корректной работы всех составляющих компьютера и периферийных устройств,
— работает с внешнего HDD, DVD, USB-флеш или другого подходящего носителя,
— предоставляет возможность установки или обновления дополнительного программного обеспечения,
— имеет актуальную базу, регулярно обновляемую производителем,
— со своей Offline-базой может работать на компьютере, не подключенном к Интернету,
— используя DevID, самостоятельно находит в сети Internet недостающую в базе информацию,
— мониторит состояние компонентов компа и ноута,
— инициирует создание контрольной точки восстановления Виндовс перед работой,
— проверяет все ПО на совместимость с данной версией операционной системы и вредоносность,
— может продолжать инсталляцию без цифровой подписи компании Майкрософт,
— с функцией Бэкапа создает резервную копию на текущее время.
Для системщиков и продвинутых есть Экспертный режим, и существует инструментарий для интеграции в базу своих альтернативных драйверпаков.
Достоинства DriverPack Solution на фоне мелких недостатков
Отлично организованный менеджер DriverPack Solution скачать бесплатно через торрент оффлайн или онлайн с постоянно обновляющейся огромной базой, безусловно, стоит. Что касается идентификации установленного на компьютере антивируса, то тут не все однозначно. Во-первых, каждый должен заниматься своим делом, и какое дело программе по установке и обновлению драйверов до антивирусной защиты. Во-вторых, такая информация является не санкционируемой утечкой конфиденциальных, а возможно, и личных данных. В-третьих, каждый пользователь может самостоятельно определить цели, задачи и средства.
Как правильно скачать DriverPack Solution Online и Offline
Несмотря ни на что, есть целесообразность скачать Драйвер Пак Солюшен торрент или онлайн версию с официального сайта для Виндовс XP, Vista, 7, 8, 8. 1, 10 (x86 / x64). С Лайт версией проблем не возникает, но нее потребуется, чтобы компьютер, куда будет производиться установка, имел нормальный Интернет. Чтобы скачать DriverPack Solution Full Offline бесплатно с оф. сайта потребуется скачать uTorrent, BitTorrent или другой торрент-клиент . В этом случае для загрузки на компьютер драйверов и дополнительного программного обеспечения (популярных утилит, веб-браузеров, архиваторов, мультимедиа проигрывателей и др.) Internet станет не обязательным условием.
1, 10 (x86 / x64). С Лайт версией проблем не возникает, но нее потребуется, чтобы компьютер, куда будет производиться установка, имел нормальный Интернет. Чтобы скачать DriverPack Solution Full Offline бесплатно с оф. сайта потребуется скачать uTorrent, BitTorrent или другой торрент-клиент . В этом случае для загрузки на компьютер драйверов и дополнительного программного обеспечения (популярных утилит, веб-браузеров, архиваторов, мультимедиа проигрывателей и др.) Internet станет не обязательным условием.
Сборник драйверов для всех Windows
Сборник драйверов от SamLab для всех 32-х и 64-битных операционных систем Windows, начиная от Windows 2000 и до Windows 10, включая серверные платформы.В качестве оболочек-установщиков, для автоопределения вашего оборудования и автоматической установки необходимых драйверов, использованы специализированные утилиты:
DriverPack Solution 16.20 Plus / Drivers Installer Assistant 8.02.20 / Snappy Driver Installer 1.21.2 / DriverPack 17.
 9.3 / оболочка для бекапа драйверов Drivers Backup Solution 3.90.21
9.3 / оболочка для бекапа драйверов Drivers Backup Solution 3.90.21В сборник включены самые актуальные драйверы, на дату релиза, собранные лично SamLab. Не путать этот пакет с драйвер-паками от Bashrat»a — эти драйверы новее и стабильнее.
SamLab, давно являясь членом команды Bashrat, имеет возможность, зная о всех проблемах аналогичных пакетов драйверов, создавать свой набор , наиболее полным и бесконфликтным!
Системные требования:
• Любые версии Windows от Windows 2000 до Windows 10 (32bit-64bit)
Торрент Сборник драйверов для всех Windows — SamDrivers 21.1 подробно:
• Драйверы для тачпадов и других устройств ввода из драйвер-паков DP_Touchpad_ХХХ устанавливать только под личным контролем и только в оболочке DPS.
• Все эти устройства имеют одинаковые ID — контролируйте то, что ставите по фирме тачпада в названии пака и по вендору ноутбука в имени папки с драйверами.
• Еще одинаковые идентификаторы встречаются у драйверов для звуковых карт и тюнеров — устанавливайте только те драйверы, какой фирмы ваше устройство.
Как добавлять/обновлять драйвер-паки в составе SamDrivers:
1. Скачиваем новые драйвер-паки с сайта driveroff.net:
Скачивать можно все драйвер-паки или только для вашей системы — тут разницы для дальнейших действий никакой нет
2. Расположение драйвер-паков в SamDrivers:
X:\SamDrivers\Drivers\ — папка для всех драйвер-паков
3. Перемещение новых драйвер-паков в соответствующие папки:
Если имена файлов совпадают (старый и новый файл имеет имя DP_Chipset_14112.7z) — просто заменяем старые файлы новыми, если есть такой же файл, но с меньшим номером, его можно удалить: скачали DP_Chipset_14112.7z, но в папке есть DP_Chipset_14111.7z — файл с меньшим номером версии DP_Chipset_14111.7z можно удалить
4. Расположение индексов драйвер-паков (списков поддерживаемых устройств) в SamDrivers:
X:\SamDrivers\Index\DIA\ — папка для индексов программы DIA (Drivers Installer Assistant)
X:\SamDrivers\Index\DPS\ — папка для индексов программы DPS (DriverPack Solution)
X:\SamDrivers\Index\DrX\ — папка для индексов программы DriverX
Индексировать драйвер-паки во всех программах не обязательно — нужны индексы в тех программах, которыми Вы пользуетесь
5. Удаление старых индексов:
Удаление старых индексов:
Заходим в папку Index и удаляем все файлы от старого драйвер-пака — имени файлов индекса соответствуют имени драйвер-пака и найти их легко — например вы скачали драйвер-пак DP_Chipset_14112.7z а у вас был DP_Chipset_14111.7z, соответственно удаляем все файлы-индексы DP_Chipset_14111_xxx.xxx, если же и скаченный и старый драйвер-пак имеют одинаковое имя например DP_Chipset_14112.7z, то индексы DP_Chipset_14112_xxx.xxx также нужно удалить т.к. список поддерживаемых устройств в новой версии драйвер-пака может отличаться.
Если вам лень выискивать нужный для удаления индекс — можете удалить все папку Index и тогда программа будет создавать индексы для всех драйвер-паков, а не только для нового, что займет больше времени, но результат будет идентичным.
6. Индексируем новые драйвер-паки (создаем списки поддерживаемых устройств):
Если старые индексы удалены, то при запуске любой из трех оболочек (DIA/DPS/DriverX), эти программы автоматически попросят вас произвести индексацию новых драйвер-паков — например программа для нового драйвер-пака DP_Chipset_14112. 7z создает файл-индекса DP_Chipset_14112_xxx.xxx в соответствующей папке в X:\SamDrivers\Index\
7z создает файл-индекса DP_Chipset_14112_xxx.xxx в соответствующей папке в X:\SamDrivers\Index\
PS: Маркеры систем:
Windows XP x64=»5×64|U10x64″;
Windows XP x86=»5×86|U10x86″;
Windows Vista x64=»6×64|NTx64|AllNTx64x86|67×64|678×64|6Xx64|U10x64″;
Windows Vista x86=»6×86|NTx86|AllNTx64x86|67×86|678×86|6Xx86|U10x86″;
Windows 7 x64=»7×64|NTx64|AllNTx64x86|67×64|678×64|78×64|781×64|7881×64|78110×64|710×64|6Xx64|U10x64″;
Windows 7 x86=»7×86|NTx86|AllNTx64x86|67×86|678×86|78×86|781×86|7881×86|78110×86|710×86|6Xx86|U10x86″;
Windows 8 x64=»8×64|NTx64|AllNTx64x86|678×64|78×64|881×64|6Xx64|7881×64|88110×64|U10x64″;
Windows 8 x86=»8×86|NTx86|AllNTx64x86|678×86|78×86|881×86|6Xx86|7881×86|88110×86|U10x86″;
Windows 8.1 x64=»81×64|NTx64|AllNTx64x86|781×64|881×64|7881×64|78110×64|8110×64|6Xx64|88110×64|U10x64″;
Windows 8.1 x86=»81×86|NTx86|AllNTx64x86|781×86|881×86|7881×86|78110×86|8110×86|6Xx86|88110×86|U10x86″;
Windows 9 x64=»9×64|NTx64|AllNTx64x86|881×64|81×64|6Xx64|88110×64|710×64″;
Windows 9 x86=»9×86|NTx86|AllNTx64x86|881×86|81×86|6Xx86|88110×86|710×86″;
Windows 10 x64=»10×64|NTx64|AllNTx64x86|78110×64|8110×64|88110×64|710×64″;
Windows 10 x86=»10×86|NTx86|AllNTx64x86|78110×86|8110×86|88110×86|710×86″;
Все x64 =»Allx64″;
Все x86 =»Allx86″;
Все XP =»AllXP»;
Все Vista =»All6″;
Все Windows 7 =»All7″;
Все Windows 8 =»All8″;
Все Windows 8. 1 =»All81″;
Все Windows 9 =»All9″;
Все Windows 10 =»All10″;
Любые Windows =»WinAll»;
Маркеры ноутбуков:
Acer_nb = acer / emachines / packard*bell / gateway / aspire
Apple_nb = apple
Asus_nb = asus
Dell_nb = dell / alienware / arima / jetway / gericom
Fujitsu_nb = fujitsu / siemens
Gigabyte_nb = gigabyte
HP_nb = hp / compaq
Lenovo_nb = lenovo / compal / ibm
LG_nb = lg
MSI_nb = msi / micro-star
NEC_nb = nec
Panasonic_nb = panasonic / matsushita
Samsung_nb = samsung
Sony_nb = sony / vaio
Toshiba_nb = toshiba
OEM_nb = другие вендоры (benq / clevo / depo / durabook / ecs / elitegroup / eurocom / getac / intel / iru / k-systems / medion / mitac / mtc / nokia / pegatron / prolink / quanta / sager / shuttle / twinhead / rover / roverbook / viewbook / viewsonic / vizio / wistron и т.д.)
Ключевые особенности сборника:
• Поддержка 32/64-разрядных операционных систем Windows XP/Vista/7/8/8. 1/10
1/10
• Максимальный набор драйверов для ПК и ноутбуков на одном диске
• Автоматическая установка в одно касание драйверов и программ
• Экспресс-диагностика оборудования вашего компьютера/ноутбука
• Резервное копирование установленных в системе драйверов
• Дружелюбный и отзывчивый мультиязычный интерфейс
• Возможность работы программы с любого носителя
Входящие в состав сборника драйвер-паки:
DP_Biometric_21020.7z
DP_Bluetooth_21020.7z
DP_CardReader_21020.7z
DP_CardReader_21022.7z
DP_Chipset_21021.7z
DP_Chipset_21022.7z
DP_LAN_Intel_21020.7z
DP_LAN_Others_21021.7z
DP_LAN_Realtek-NT_21021.7z
DP_LAN_Realtek-XP_21020.7z
DP_MassStorage_21020.7z
DP_Misc_21021.7z
DP_Modem_21020.7z
DP_Monitor_21021.7z
DP_Printer_21020.7z
DP_Sound_CMedia_21020.7z
DP_Sound_Conexant_21020.7z
DP_Sound_Creative_21020.7z
DP_Sound_Creative_21022.7z
DP_Sound_IDT_21020.7z
DP_Sound_Intel_21021.7z
DP_Sound_Others_21021. 7z
7z
DP_Sound_VIA_21020.7z
DP_Sounds_HDMI_21020.7z
DP_Sounds_Realtek_21021.7z
DP_Sounds_Realtek_21022.7z
DP_Telephone_21021.7z
DP_Touchpad_Alps_21020.7z
DP_Touchpad_Cypress_21020.7z
DP_Touchpad_Elan_21021.7z
DP_Touchpad_Others_21020.7z
DP_Touchpad_Synaptics_21021.7z
DP_TV_Aver_21020.7z
DP_TV_Beholder_21020.7z
DP_TV_DVB_21020.7z
DP_TV_Others_21020.7z
DP_Vendor_21021.7z
DP_Vendor_21022.7z
DP_Video_Intel-NT_21020.7z
DP_Video_Intel-NT_21022.7z
DP_Video_Intel-XP_21020.7z
DP_Video_nVIDIA-NT_21021.7z
DP_Video_nVIDIA-NT_21022.7z
DP_Video_nVIDIA-XP_21020.7z
DP_Video_nVIDIA_Legacy-NT_21020.7z
DP_Video_nVIDIA_Server_21020.7z
DP_Videos_AMD-NT_21020.7z
DP_Videos_AMD-XP_21020.7z
DP_Videos_AMD_Legacy-NT_21020.7z
DP_Videos_AMD_Server_21020.7z
DP_Videos_Others_21020.7z
DP_WebCam_21021.7z
DP_WebCam_21022.7z
DP_WLAN-WiFi_21021.7z
DP_WWAN-4G_21020.7z
DP_xUSB_21020.7z
DP_zAndroid_21020.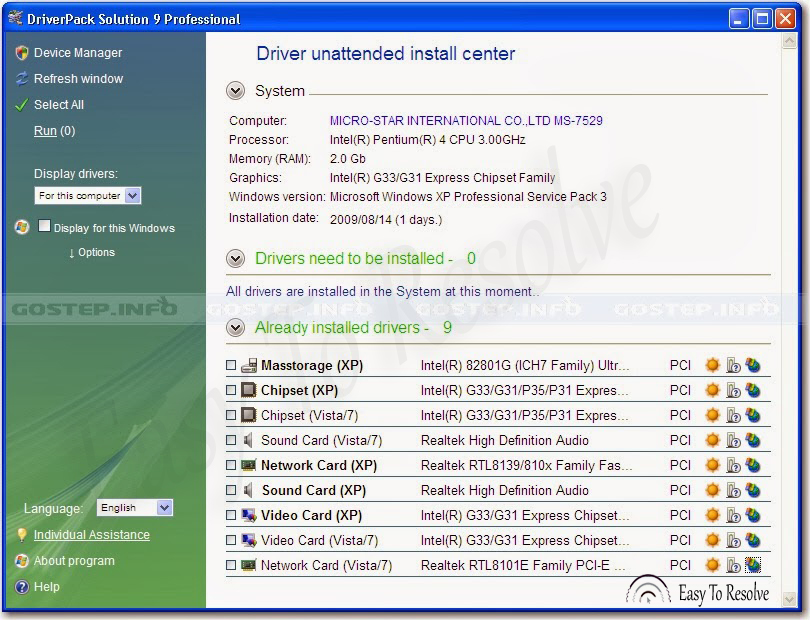 7z
7z
DP_zUSB3_21020.7z
DP_zVirtual_21021.7z
Входящие в состав программы:
Системные
=========
DirectX +
CoDeC Pack +
AOMEI Backupper +
Flash Player +
Shockwave Player —
RuntimePack
Библиотеки Windows +
Microsoft Visual C++
.Net Framework —
Silverlight —
Java Runtime —
Браузеры
========
SlimJet (Chrome) +
Opera +
Mozilla Firefox +
Файловые
========
7-Zip —
CDBurnerXP —
WinRAR +
Просмотрщики
============
Foxit PDF Reader +
FastStone Image Viewer +
Плееры
======
AIMP +
PotPlayer +
Общение
=======
QIP —
Skype +
Интернет
========
TeamViewer —
uTorrent +
Антивирусы
==========
360 Total Security —
Tencent PC Manager —
Разное
======
Classic Shell —
Punto Switcher —
Контрольные суммы:
Файл: SamDrivers_21.1.iso
md5: ff5b16069503234e744bc25b9756182d
Скачать Сборник драйверов для всех Windows — SamDrivers 21. 1 через торрент:
1 через торрент:
автоматическое обновление драйверов Windows [ОБЗОР]
Категорически утверждаю, с уверенностью в 100%, что полностью бесплатная программа Snappy Driver Installer является самым лучшим, надёжным, стабильным, безопасным, быстрым, удобным и безошибочным средством пакетной автоматической установки и обновления драйверов Windows.
В этой статье обосную такое заявление и опишу её Вам подробненько.
Что такое драйвер
Давайте кратко напомню, что такое драйвер. Это такие малюсенькие программки, которые помогают операционной системе Windows оптимально взаимодействовать со всеми комплектующими компьютера.
Если в компьютере не будет установлен драйвер звуковой карты — не будет звука, а нет драйвера USB — ни одна флешка не распознается системой.
В случае установки неподходящего драйвера — оборудование будет работать «коряво», со сбоями и «глюками» (если вообще будет), к тому же медленнее, чем может.
Это главная проблема всех конкурентов Snappy Driver Installer (SDI) — они плохо и неточно подбирают драйверы, из-за чего чаще приносят больше вреда, чем пользы.
История Snappy Driver Installer
О, это целая «Санта-Барбара», скажу я Вам — она заслуживает отдельной главы в этой статье.
Жил-был Артур Кузяков. Однажды его посетила воистину гениальная мысль создать лучшую программу для поиска, установки или автоматического обновления драйверов одним кликом мышки (ему памятник надо поставить за это, серьёзно).
У него это получилось — программа DriverPack Solution (DPS) оказалась очень популярна и всемирно известна, на то время она вообще не имела конкурентов.
Читайте также на сайте:
…
…
У миллионов пользователей компьютера отпала необходимость, после установки Windows, перерывать половину Интернета в поисках драйверов.
Шло время, пакет драйверов увеличивался в размерах и DPS начал медленно работать, ошибаться в подборе драйверов — его алгоритм устаревал.
В команду разработчиков «подтянули» гения программного кода под ником в сети BadPointer, который какое-то время спасал положение. Но всему приходит конец — у него лопнуло терпение и он решил переписать полностью код программы.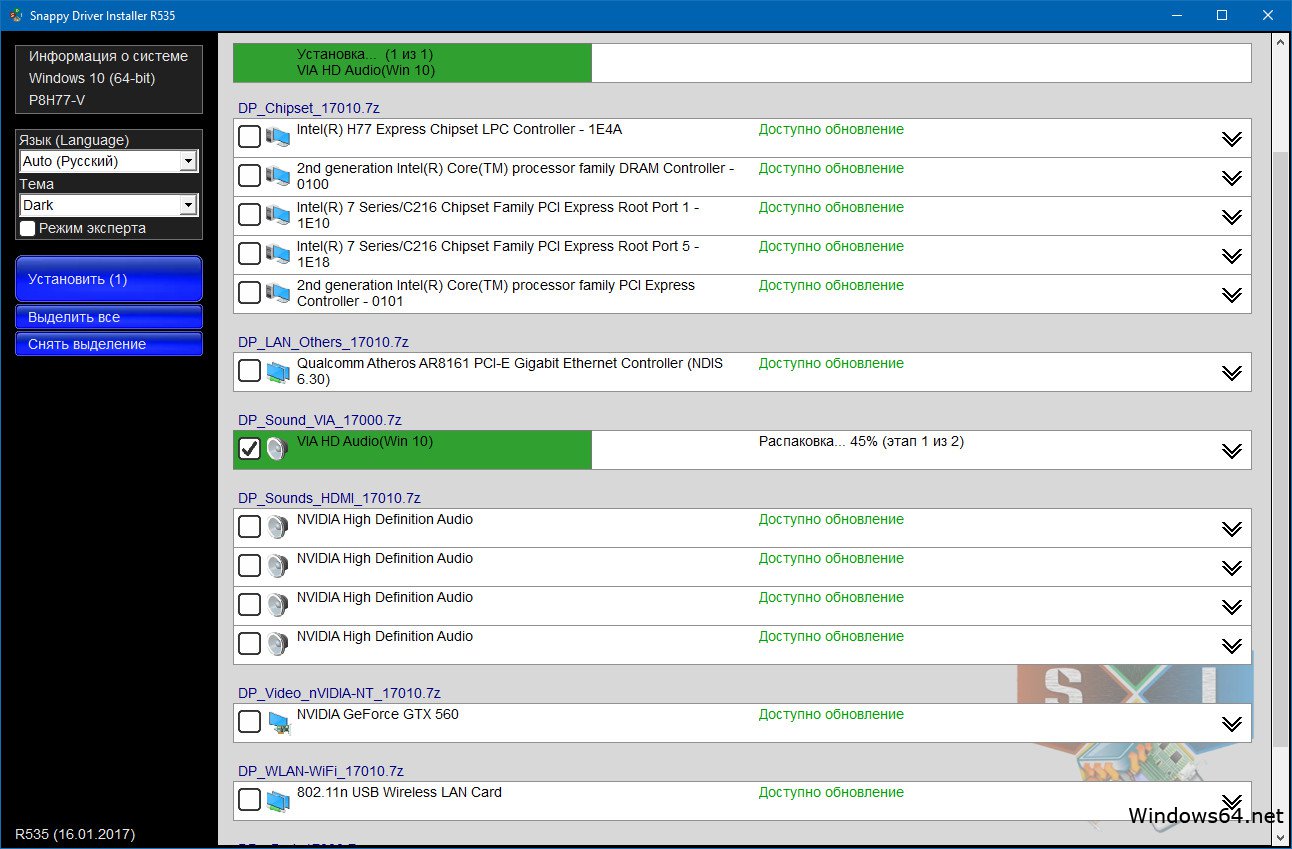
Что там не поделили Артур с BadPointer’ом — история умалчивает, но последний ушёл из команды (так часто бывает) и создал с нуля Snappy Driver Installer, учтя и исправив все ошибки с недоработками DSP.
В итоге, простые пользователи компьютера получили гораздо лучший программный продукт, работающий быстрее и точнее. Вот и конкуренция в чистом виде — двигатель прогресса.
Чем SDI отличается от DPS
Самое главное отличие — скорость запуска, определения конфигурации компьютера и абсолютно точная подборка драйверов за счет учета гораздо большего количества характеристик драйверов и устройств, осуществления ранжирования драйверов по степени совместимости (в SDI полностью переписан алгоритм этого процесса). Также…
- DPS — зависит от встроенного в систему Internet Explorer и оставляет записи в реестре. Драйвера устанавливаются просто идентично установке через диспетчер устройств. Предлагает установку и обновление «популярных» программ (внимательные пользователи (где они?) могут снять галочки).

- SDI — не имеет внешних зависимостей и работает даже в Windows PE. Не оставляет следов в системе. Тоже устанавливает драйвера через диспетчер устройств, но автоматически нажимает «продолжить» при установке неподписанных драйверов. Не подсовывает никаких лишних, дополнительных программ для установки.
Давайте уже наконец-то перейдём к установке или обновлению драйверов…
Автоматическое обновление драйверов Windows с SDI
В скачанной (по ссылке в конце статьи) папке…
…находим ярлык и кликаем на него для запуска SDI…
…соглашаемся с лицензией…
…и видим главное рабочее окно программы…
Snappy Driver Installer моментально просканировала мой компьютер и выдала вердикт — нужно обновить три драйвера. Для неопытных пользователей не советую что-либо менять в левой колонке…
Правда, можете тему оформления сменить.
Кстати, при наведении курсора на любой пункт — появляется подсказка…
Выделяем ВСЕ драйвера галками (я отчаянный пользователь и не делаю точек восстановления) — смело тыкаем на большую зелёную кнопку «Установить»…
Процесс обновления драйверов пошёл…
В конце получаем жизнерадостную и долгожданную новость…
Перезагружаем компьютер и радуемся.
После работы Snappy Driver Installer оценка производительности моего компьютера заметно выросла.
Скачать Snappy Driver Installer
| Название программы (сервиса): | Snappy Driver Installer |
| Производитель (автор): | BadPointer |
| Статус: | Бесплатно |
| Категория: | Драйверы |
| Размер инсталлятора (архива): | 21.7 Гб |
| Поддержка ОС: | Windows XP,7,8,10 |
| Язык интерфейса: | Английский, Русский + 25 языков |
| Безопасность: | Вирусов нет |
| Похожие программы/сервисы: | DriverHubIObit Driver Booster |
| Ссылка на инсталлятор/сайт: | Получить/Перейти |
…
…
Программа не требует установки, но она просто огромная — около 21 ГБ! А что Вы хотели, ведь в этом пакете драйверов ВСЕ драйверы на ВСЕ устройства в мире! Найдутся даже на самые древние материнские платы, видеокарты, сканеры, принтеры…
Именно поэтому автор распространяет её исключительно через торрент-треккеры (как качать торренты).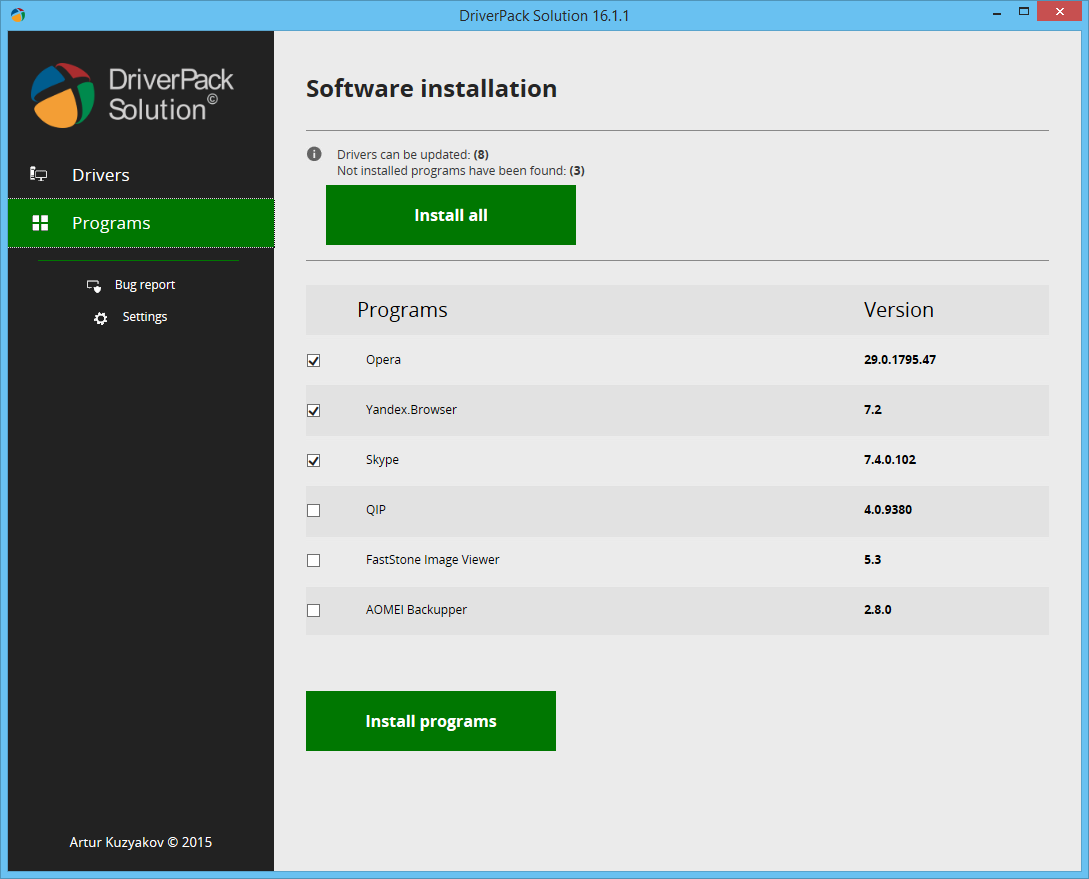
Уверен, что автоматическая установка и обновление драйверов Windows одним кликом очень понравится товарищам, которые часто устанавливают эту операционную систему своим друзьям и знакомым.
Закинул на флешку Snappy Driver Installer — и ты чемпион мира по реанимации любого компьютера!
До новых полезных компьютерных программ и интересных приложений для Андроид.
ПОЛЕЗНОЕ ВИДЕО
…
…
4.4 / 5 ( 19 голосов )
Уверенный пользователь трех домашних ПК с многолетним опытом, «компьютерщик» для всех родственников, соседей и знакомых, в течении 11-ти лет автор более тысячи обзоров интересных и полезных программ для компьютера на собственном софтовом блоге OptimaKomp.RU
Я только обозреваю программы!
Любые претензии — к их производителям!
Все комментарии проходят модерацию
DriverPack Solution — программа для подбора и установки драйверов
Нам не редко приходиться переустанавливать операционную систему Windows. Хотя база драйверов Windows не маленькая, но часто бывает такое что не установились драйвера для видеокарты, сетевого адаптера и на другую аппаратную часть персонального компьютера. И как на зло нет диска с родными драйверами. Но не стоит отчаиваться, когда есть такая замечательная программа для установки драйверов, как DriverPack Solution.
Хотя база драйверов Windows не маленькая, но часто бывает такое что не установились драйвера для видеокарты, сетевого адаптера и на другую аппаратную часть персонального компьютера. И как на зло нет диска с родными драйверами. Но не стоит отчаиваться, когда есть такая замечательная программа для установки драйверов, как DriverPack Solution.
С одной стороны драйвер для каждого периферийного устройства ПК можно скачать с официального сайта производителя (актуальные на сегодняшний день) или воспользоваться онлайн сервисом Ma-Config.com для анализ конфигурации компьютера и подборка драйверов онлайн, но DriverPack Solution стал на сегодняшний день наилучшим помощником системного администратора.
DriverPack Solution – лучшая и достаточно мощная программа для подбора и установки драйверов, также обновления и поиска по Интернету. Поиск по Интернету осуществляется, когда в базе программы не найден подходящий драйвер. В этом случае программа DriverPack ссылает пользователя на официальный сайт производителя устройства, где можно найти нужный драйвер и скачать его. Но в большинство случаях DriverPack Solution не подводит и доступ в Интернет с этой программой иметь не обязательно.
Но в большинство случаях DriverPack Solution не подводит и доступ в Интернет с этой программой иметь не обязательно.
Поиск, подборка и установка драйверов происходят в автоматическом режиме, после запуска программы. Установка драйверов занимает 3 — 5 минут. Поддержка: Windows 8 / 7 / Vista / XP (32 bit и 64 bit), а также возможно обновления программы DriverPack на более актуальную версию через Интернет.
Разработчики программы DriverPack Solution предоставляют нам скачать:
- DriverPack Solution Lite — это облегченная версия мощного менеджера установки драйверов. Автоматически сканирует оборудование компьютера и предлагает скачать из Интернета неустановленные драйвера.
- DriverPack Solution Full — это полная версия программы для установки драйверов. Автоматически сканирует оборудование компьютера и предлагает установить/обновить драйвера для всех устройств в режиме Offline.
Я Вам порекомендую скачать DriverPack Solution Full, так как это более удобно, если у вас вдруг не окажется Интернета, а такие случаи часто бывают. Загрузка производится через Torrent, поэтому посоветую для начала установить Torrent-клиент, если конечно его у Вас нету.
Загрузка производится через Torrent, поэтому посоветую для начала установить Torrent-клиент, если конечно его у Вас нету.
Как пользоваться DriverPack Solution
Интерфейсы версий программы DriverPack Solution Lite и DriverPack Solution Full совершено одинаковые, разница только в том что первая выполняет установку драйверов через Интернет, то есть ссылает пользователя на официальный сайт, например видеокарты и дальше нужно скачать драйвер и установить его. Размер DriverPack Solution Lite всего лишь 7 Мб.
DriverPack Solution Full – это полная версия программы и установку драйверов осуществляет из своей базы в режиме Offline, то есть даже без наличия Интернета, но размер программы не менее 3 Гб. Я пользуюсь DriverPack Solution Full и вам тоже советую.
После того как Вы скачаете программу DriverPack Solution Full – можно записать на DVD диск, переносной жесткий диск или флешку. Кстати если у Вас испорчена флешка, то прочитайте статью восстановление флешки.
На компьютере, где есть не установленные драйвера запускаем программу DriverPack Solution и ждем ее полной загрузки. В этот момент она загружает свою базу драйверов и выполняет по ней подборку и поиск подходящих драйверов для вашего компьютера или ноутбука.
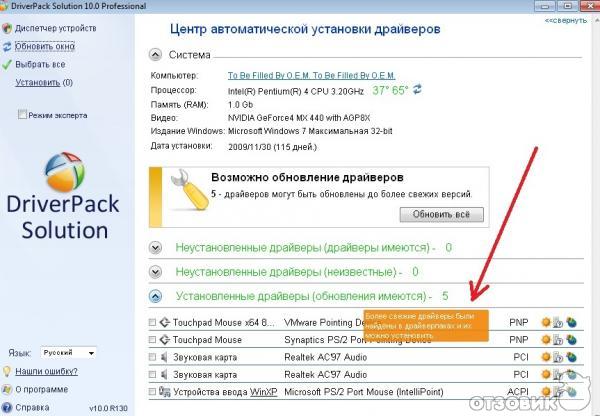
В разделе Неустановленные драйвера можно увидеть список драйверов которые можно установить на свой компьютер. А в разделе Обновления для драйверов соответственно обновления. Драйвера можно устанавливать или обновлять по одному или сразу все нажав на кнопку Установить все и Обновить все. Через 3-5 мин установка всех драйверов на Вашем компьютере завершена.
В разделе Для ноутбуков можно подобрать драйвер для своего ноутбука. Тут лучше один раз увидеть. Вот видео, как скачать драйверы для ноутбука.
Также есть удобный раздел Каталог драйверов, где можно найти отдельный драйвер для определенного устройства:
- Видеокарта (video)
- Звуковые карты (sound)
- Чипсет (chipset)
- Сетевое оборудование (lan)
- USB устройства (usb)
- Беспроводной интернет (wifi)
- Веб-камеры (webcamera)
- Принтеры (printer)
- Другие устройства (other)
- ТВ-тюнеры (tvtuner)
- Процессор (cpu)
- Сканеры (scaner)
- Bluetooth (bluetooth)
- SATA-RAID (massstorage)
- Устройства ввода (inputdev)
- Мониторы (monitor)
- Карт-ридеры (cardreader)
- Телефоны (phone)
Таким образом программа DriverPack Solution является удобным и мощным средством для поиска, подбора и установки драйверов на компьютер в автоматическом режиме. Программа DriverPack Solution совершено бесплатная.
Программа DriverPack Solution совершено бесплатная.
Ссылка DriverPack Solution.
А также небольшой промо-ролик DriverPack Solution.
Интересное на сайте:
Добавить комментарий
Подборка 5 приложений для обновления драйверов на ПК | Tech News
1. DriverPack Solution
DriverPack SolutionDriverPack Solution
DriverPack Solution – программа предназначенная для автоматизации обновления драйверов в операционной системе Windows. Распространение бесплатное. Программа включает в себя огромную базу драйверов для разных устройств ПК. На текущий момент количество драйверов превышает 12 тысяч.
На текущий момент количество драйверов превышает 12 тысяч.
DriverPack автоматически проводит анализ на отсутствие драйверов в системе, и в следствии предложит вам их установить из предложенного списка. Данная программа поможет вам сэкономить время при поиске нужного драйвера, а так же повысить стабильность работы компьютера.
Особенности и возможности программы
автоматическая проверка оборудования на наличие устаревших/отсутствующих драйверов
возможность полной установки/переустановки/обновления драйвера устройства
поиск в сети отсутствующего в базе драйвера, с применением функции DevID
регулярное обновление базы драйверов
Программа распространяется в 2 версиях:
DriverPack Online – сетевая версия приложения, занимает мало места и позволяет найти и скачать драйвер для устройства непосредственно с сайта разработчика, из минусов – необходимо хорошее подключение к сети интернет.
DriverPack Full – оффлайн версия приложения, включает в себя полную базу драйверов на сегодняшний день, не требует установки, из минусов – занимает много места на диске.
2. Driver Checker
Driver CheckerDriver Checker
Driver Checker — хорошая программа для поиска и обновления драйверов устройств компьютера. Программа анализирует устройства в операционной системе на наличие устаревших драйверов, и предлагает выполнить их обновление, если удастся найти более свежий драйвер.
При наличии ошибок в драйверах, есть возможность отката на прошлую версию драйвера. На текущее время в базе приложения присутствует более 2000000 записей драйверов оборудования, в число которых входят как периферийные устройства, так и различные комплектующие.
Особенности и возможности программы
функция восстановления системных драйверов
бекап предыдущей версии драйвера для возможности дальнейшего восстановления
удаление текущего драйвера из системы
эспорт драйвера(ов) на логический жёсткий диск
работа приложения в фоновом режиме
простой и интуитивный интерфейс
3.
 Driver GeniusDriver Genius
Driver GeniusDriver GeniusDriver Genius
Достаточно популярная многофункциональная программа для работы с драйверами. Поддерживается автоматический поиск и обновление драйверов до актуальной версии, создание резервных копий драйверов из системы, удаление старых и не нужных драйверов. Программа поддерживает работу с большинством различных устройств и комплектующих, огромным количеством материнских плат и.т.д. База драйверов обновляется довольно часто.
Особенности и возможности программы
поиск актуальных версий драйверов для устройств вашего ПК
автоматическое обновление драйверов
бэкап всех драйверов компьютера в исполняемый архив с автоматическим установщиком
удаление недействительных или ненужных драйверов устройств в целях повышения производительности и стабильности системы в целом
инструмент для вывода информации о системе
мониторинг температуры оборудования
4.
 Snappy Driver InstallerSnappy Driver Installer
Snappy Driver InstallerSnappy Driver InstallerSnappy Driver Installer
Snappy Driver Installer- программа для установки и обновления драйверов на компьютерах под управлением Microsoft Windows, включающая в себя пакет драйверов для различного оборудования. Пользоваться программой можно как для установки драйверов на новые компьютеры, так и обновлять существующие драйвера устройств на обычных пк.
Плюс SDI в том, что она не навязывает пользователю установку ненужного ПО, реклама полностью отсутствует, как и дополнительные траты на премиум функции, доступ в Интернет не обязателен.
Особенности и возможности программы
портативность, программу не нужно устанавливать, просто откройте исполняемый файл
автоматическое обновление пакетов драйверов и приложения через Интернет
многоязычный интерфейс
лучший алгоритм поиска драйверов в системе
возможность работы без подключения к интернету
высокая скорость работы
утилита совершенно бесплатна
совместимость, поддерживаются все выпуски и редакции Windows, включая серверные
5.
 Driver Booster FreeDriver Booster Free
Driver Booster FreeDriver Booster FreeDriver Booster Free
Driver Booster Free -это действительно полезный инструмент, который всегда будет поддерживать драйвера в системе в актуальном состоянии. Программа сканирует вашу систему автоматически после установки и предоставляет вам список драйверов вашего компьютера с полной информацией об их версиях и доступных обновлениях. Так же программа позволяет исправлять неполадки в работе Windows. Имеется очень полезная функция ‘Игровой режим’, при активации которой, происходит оптимизация всех драйверов и ресурсов системы, улучшая их производительность в играх.
Особенности и возможности программы
автоматическое обновление и поиск устаревших драйверов
удаление старых и неправильно функционирующих драйверов
оптимизация драйверов в целях повышения производительности в играх
вывод информации по установленным драйверам
возможность бэкэпа драйверов и корректное их восстановление
красочный интерфейс программы, смена темы оформления приложения, настройка параметра прозрачности окна приложения
Понравилась подборка? подписывайтесь, ставьте лайки! Всем добра!
Драйверы и файлы для загрузки
LEXMARK SOFTWARE LIMITED WARRANTY AND LICENSE AGREEMENT
PLEASE READ CAREFULLY BEFORE USING AND INSTALLING THIS SOFTWARE PROGRAM OR USING THIS PRODUCT: BY USING THIS SOFTWARE PROGRAM OR THIS PRODUCT, YOU AGREE TO BE BOUND BY ALL THE TERMS AND CONDITIONS OF THIS SOFTWARE LIMITED WARRANTY AND LICENSE AGREEMENTS. IF YOU DO NOT AGREE, DO NOT INSTALL, COPY, DOWNLOAD THE SOFTWARE PROGRAM OR OTHERWISE USE THE PRODUCT. IF YOU DO NOT AGREE WITH THE TERMS OF THIS SOFTWARE LIMITED WARRANTY AND LICENSE AGREEMENTS, PROMPTLY RETURN THE PRODUCT UNUSED AND REQUEST A REFUND OF THE AMOUNT YOU PAID. IF YOU ARE INSTALLING THIS SOFTWARE PROGRAM OR PRODUCT FOR USE BY OTHER PARTIES, YOU AGREE TO INFORM THE USERS THAT USE OF THE SOFTWARE PROGRAM OR PRODUCT INDICATES ACCEPTANCE OF THESE TERMS.
IF YOU DO NOT AGREE, DO NOT INSTALL, COPY, DOWNLOAD THE SOFTWARE PROGRAM OR OTHERWISE USE THE PRODUCT. IF YOU DO NOT AGREE WITH THE TERMS OF THIS SOFTWARE LIMITED WARRANTY AND LICENSE AGREEMENTS, PROMPTLY RETURN THE PRODUCT UNUSED AND REQUEST A REFUND OF THE AMOUNT YOU PAID. IF YOU ARE INSTALLING THIS SOFTWARE PROGRAM OR PRODUCT FOR USE BY OTHER PARTIES, YOU AGREE TO INFORM THE USERS THAT USE OF THE SOFTWARE PROGRAM OR PRODUCT INDICATES ACCEPTANCE OF THESE TERMS.
FIRMWARE UPDATES
FIRMWARE UPDATES MAY MODIFY PRINTER SETTINGS AND CAUSE COUNTERFEIT AND/OR UNAUTHORIZED PRODUCTS, SUPPLIES, PARTS, MATERIALS (SUCH AS TONERS AND INKS), SOFTWARE, OR INTERFACES TO STOP WORKING.
RETURN PROGRAM AGREEMENT TERMS
Your Lexmark device is subject to the Lexmark Return Program agreement terms, which can be found at http://www.lexmark.com/printerlicense.
SOFTWARE LICENSE AGREEMENT
This Software Limited Warranty and License Agreement («Software License Agreement») is a legal agreement between you (either an individual or a single entity) and Lexmark International, Inc. and Lexmark International Technology Sarl («Licensor») that to the extent your Licensor product or Software Program is not otherwise subject to a written software license agreement between you and Licensor or its suppliers, governs your use of any Software Program installed on or provided by Licensor for use in connection with your Licensor product. The term «Software Program» includes machine-readable instructions, audio/visual content (such as images and recordings), and associated media, printed materials and electronic documentation, whether incorporated into, distributed with or for use with your Licensor product.
1. STATEMENT OF SOFTWARE LIMITED WARRANTY. Licensor warrants that media (e.g., diskette or compact disk) on which the Software Program is furnished, if any, is free from defects in materials and workmanship under normal use during the warranty period. The warranty period is ninety (90) days and commences on the date the Software Program is delivered to the original end-user. This limited warranty applies only to Software Program media purchased new from Licensor or an Authorized Licensor Reseller or Distributor. Licensor will replace the Software Program should it be determined that the media does not conform to this limited warranty.
2. DISCLAIMER AND LIMITATION OF WARRANTIES. TO THE MAXIMUM EXTENT PERMITTED BY APPLICABLE LAW, LICENSOR AND ITS SUPPLIERS PROVIDE THE SOFTWARE PROGRAM «AS IS» AND HEREBY DISCLAIM ALL OTHER WARRANTIES AND CONDITIONS, EITHER EXPRESS OR IMPLIED, INCLUDING, BUT NOT LIMITED TO, TITLE, NON-INFRINGEMENT, MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE, AND ABSENCE OF VIRUSES, ALL WITH REGARD TO THE SOFTWARE PROGRAM. LICENSOR: (x) UNDERTAKES NO RESPONSIBILITY FOR THE QUALITY OF THE SOFTWARE PROGRAM AND (y) ASSUMES NO RESPONSIBILITY THAT THE SOFTWARE PROGRAM WILL BE FIT FOR ANY PARTICULAR PURPOSE FOR WHICH YOU MAY BE ACQUIRING IT, EXCEPT AS OTHERWISE PROVIDED IN THIS DISCLAIMER.
This Agreement is to be read in conjunction with certain statutory provisions, as that may be in force from time to time, that imply warranties or conditions or impose obligations on Licensor that cannot be excluded or modified. If any such provisions apply, then to the extent Licensor is able, Licensor hereby limits its liability for breach of those provisions to one of the following: providing you a replacement copy of the Software Program or reimbursement of the greater of the price paid for the Software Program or five U.S. dollars (or the equivalent in local currency).
The Software Program may include internet links to other software applications and/or Internet sites hosted and operated by third parties unaffiliated with Licensor. You acknowledge and agree that Licensor is not responsible in any way for the hosting, performance, operation, maintenance, or content of, such software applications and/or Internet sites.
3. LIMITATION OF REMEDY. TO THE MAXIMUM EXTENT PERMITTED BY APPLICABLE LAW, ANY AND ALL LIABILITY OF LICENSOR UNDER THIS SOFTWARE LICENSE AGREEMENT IS EXPRESSLY LIMITED TO THE GREATER OF THE PRICE PAID FOR THE SOFTWARE PROGRAM AND FIVE U.S. DOLLARS (OR THE EQUIVALENT IN LOCAL CURRENCY). YOUR SOLE REMEDY AGAINST LICENSOR IN ANY DISPUTE UNDER THIS SOFTWARE LICENSE AGREEMENT SHALL BE TO SEEK TO RECOVER ONE OF THESE AMOUNTS, UPON PAYMENT OF WHICH LICENSOR SHALL BE RELEASED AND DISCHARGED OF ALL FURTHER OBLIGATIONS AND LIABILITY TO YOU.
IN NO EVENT WILL LICENSOR, ITS SUPPLIERS, SUBSIDIARIES, OR RESELLERS BE LIABLE FOR ANY SPECIAL, INCIDENTAL, INDIRECT, EXEMPLARY, PUNITIVE, OR CONSEQUENTIAL DAMAGES (INCLUDING BUT NOT LIMITED TO LOST PROFITS OR REVENUES, LOST SAVINGS, INTERRUPTION OF USE OR ANY LOSS OF, INACCURACY IN, OR DAMAGE TO, DATA OR RECORDS, FOR CLAIMS OF THIRD PARTIES, OR DAMAGE TO REAL OR TANGIBLE PROPERTY, FOR LOSS OF PRIVACY), IN CONNECTION WITH THE SOFTWARE PROGRAM, INCLUDING WITHOUT LIMITATION, ANY SUCH DAMAGES RESULTING FROM (a) THE USE OR INABILITY TO USE THE SOFTWARE PROGRAM, (b) THE COST OF PROCURING SUBSTITUTE SOFTWARE, OR (c) UNAUTHORIZED ACCESS TO OR ALTERATION OF YOUR CONTENT, REGARDLESS OF THE NATURE OF THE CLAIM, INCLUDING BUT NOT LIMITED TO BREACH OF WARRANTY OR CONTRACT, TORT (INCLUDING NEGLIGENCE OR STRICT LIABILITY), AND EVEN IF LICENSOR, OR ITS SUPPLIERS, AFFILIATES, OR REMARKETERS HAVE BEEN ADVISED OF THE POSSIBILITY OF SUCH DAMAGES, OR FOR ANY CLAIM BY YOU BASED ON A THIRD-PARTY CLAIM, EXCEPT TO THE EXTENT THIS EXCLUSION OF DAMAGES IS DETERMINED LEGALLY INVALID. THE FOREGOING LIMITATIONS APPLY EVEN IF THE ABOVE-STATED REMEDIES FAIL OF THEIR ESSENTIAL PURPOSE.
SOME JURISDICTIONS DO NOT ALLOW EXCLUSION OF CERTAIN WARRANTIES OR THE LIMITATION OR EXCLUSION OF LIABILITY FOR INCIDENTAL OR CONSEQUENTIAL DAMAGES. ACCORDINGLY, SOME OR ALL OF THE ABOVE EXCLUSIONS OR LIMITATIONS MAY NOT APPLY TO YOU, AND YOU MAY HAVE OTHER RIGHTS.
4. LICENSE GRANT. Licensor grants you the following rights provided you comply with all terms and conditions of this Software License Agreement:
a. Use. You may Use one (1) copy of the Software Program. The term «Use» means storing, loading, installing, executing, or displaying the Software Program. You may not separate the components of the Software Program for use on more than one computer. You agree that you will not Use the Software Program, in whole or in part, in any manner that has the effect of overriding, modifying, eliminating, obscuring, altering or de-emphasizing the visual appearance of any trademark, trade name, trade dress or intellectual property notice that appears on any computer display screens normally generated by, or as a result of, the Software Program.
b. Copying. You may make one (1) copy of the Software Program solely for purposes of backup, archiving, or installation, provided the copy contains all of the original Software Program’s proprietary notices. You may not copy the Software Program to any public or distributed network.
5. RESERVATION OF RIGHTS. The Software Program, including all fonts, is copyrighted and owned by Licensor and/or its suppliers. Licensor reserves all rights not expressly granted to you in this Software License Agreement.
6. FREEWARE. Notwithstanding the terms and conditions of this Software License Agreement, all or any portion of the Software Program that constitutes software provided under public license by third parties («Freeware») is licensed to you subject to the terms and conditions of the software license agreement accompanying such Freeware, whether in the form of a discrete agreement, shrink-wrap license, or electronic license terms at the time of download or installation. Use of the Freeware by you shall be governed entirely by the terms and conditions of such license.
7. LIMITATION ON REVERSE ENGINEERING. You may not alter, decrypt, reverse engineer, reverse assemble, reverse compile or otherwise translate the Software Program or assist or otherwise facilitate others to do so, except as and to the extent expressly permitted to do so by applicable law for the purposes of inter-operability, error correction, and security testing. If you have such statutory rights, you will notify Licensor in writing of any intended reverse engineering, reverse assembly, or reverse compilation. You may not decrypt the Software Program unless necessary for the legitimate Use of the Software Program.
8. TRANSFER. You may transfer the Software Program to another end-user. Any transfer must include all software components, media, printed materials, and this Software License Agreement and you may not retain copies of the Software Program or components thereof. The transfer may not be an indirect transfer, such as a consignment. Prior to the transfer, the end-user receiving the transferred Software Program must agree to all these Software License Agreement terms. Upon transfer of the Software Program, your license is automatically terminated. You may not rent, sublicense, or assign the Software Program except to the extent provided in this Software License Agreement.
9. UPGRADES. To Use a Software Program identified as an upgrade, you must first be licensed to the original Software Program identified by Licensor as eligible for the upgrade. After upgrading, you may no longer use the original Software Program that formed the basis for your upgrade eligibility.
10. ADDITIONAL SOFTWARE. This Software License Agreement applies to updates or supplements to the original Software Program provided by Licensor unless Licensor provides other terms along with the update or supplement.
11. TERM. This Software License Agreement becomes effective upon your acceptance and continues in effect unless terminated or rejected. You may reject or terminate this license at any time by destroying all copies of the Software Program, together with all modifications, documentation, and merged portions in any form, or as otherwise described herein. Licensor may terminate your license upon notice if you fail to comply with any of the terms of this Software License Agreement. Upon such termination, you agree to destroy all copies of the Software Program together with all modifications, documentation, and merged portions in any form.
12. TAXES. You agree that you are responsible for payment of any taxes including, without limitation, any goods and services and personal property taxes, resulting from this Software License Agreement or your Use of the Software Program.
13. LIMITATION ON ACTIONS. No action, regardless of form, arising out of this Software License Agreement may be brought by either party more than two years after the cause of action has arisen, except as provided under applicable law.
14. APPLICABLE LAW. If you acquired this product in a country which is a member of the European Union, the laws of that country shall govern the interpretation of this Software License Agreement and any claims arising hereunder, regardless of choice of laws principles of any other jurisdiction. If you acquired this product in any other country, the laws of the Commonwealth of Kentucky, United States of America, shall govern the interpretation of this Software License Agreement and any claims arising hereunder, regardless of choice of laws principles of any other state. The UN Convention on Contracts for the International Sale of Goods shall not apply.
15. GOVERNMENT END USERS. The Software Program and any related documentation are «Commercial Items,» as that term is defined in 48 C.F.R. 2.101, «Computer Software» and «Commercial Computer Software Documentation,» as such terms are used in 48 C.F.R. 12.212 or 48 C.F.R. 227.7202, as applicable. Consistent with 48 C.F.R. 12.212 or 48 C.F.R. 227.7202-1 through 227.7207-4, as applicable, the Commercial Computer Software and Commercial Software Documentation are licensed to the U.S. Government end users (a) only as Commercial Items and (b) with only those rights as are granted to all other end users pursuant to the terms and conditions herein.
16. CONSENT TO PROCESS AND TRANSFER DATA. You agree to comply with all applicable laws and regulations including, but not limited to, laws pertaining to the collection and use of personal data. You agree that Licensor, its affiliates, and agents may collect and process information (including any personal data) you provide or that is gathered or generated by the Software Program in relation to (i) any support services performed in connection with the Software Program and requested by you, (ii) enabling any functionality of the Software Program or services provided by Licensor, or (iii) enabling Licensor to perform any other services related to the Software Program as you and Licensor may agree. Licensor agrees to process the information only to the extent necessary to provide such services or enable the functionality of the Software Program. You represent that in relation to any personal data Licensor is permitted to access under this Agreement you have obtained or will obtain (a) any consents from the data subjects and/or (b) any other permissions or authorizations related to processing of the personal data that are required by applicable law. You agree that Licensor may transfer your information to the United States or other countries for processing in accordance with this Section.
17. EXPORT RESTRICTIONS. You may not (a) acquire, ship, transfer, or reexport, directly or indirectly, the Software Program or any direct product therefrom, in violation of any applicable export laws or (b) permit the Software Program to be used for any purpose prohibited by such export laws, including, without limitation, nuclear, chemical, or biological weapons proliferation.
18. AGREEMENT TO CONTRACT ELECTRONICALLY. You and Licensor agree to form this Software License Agreement electronically. This means that by downloading, installing and/or using the Software Program, you acknowledge your agreement to these Software License Agreement terms and conditions and that you are doing so with the intent to «sign» a contract with Licensor.
19. CAPACITY AND AUTHORITY TO CONTRACT. You represent that you are of the legal age of majority in the place you sign this Software License Agreement and, if applicable, you are duly authorized by your employer or principal to enter into this contract.
20. ENTIRE AGREEMENT. This Software License Agreement (including any addendum or amendment to this Software License Agreement that is included with the Software Program) is the entire agreement between you and Licensor relating to the Software Program. Except as otherwise provided for herein, this Software License Agreement supersedes all prior or contemporaneous oral or written communications, proposals, and representations with respect to the Software Program or any other subject matter covered by this Software License Agreement (except to the extent such extraneous terms do not conflict with the terms of this Software License Agreement, any other written agreement signed by you and Licensor relating to your use of the Software Program). To the extent any Licensor policies or programs for support services conflict with the terms of this Software License Agreement, the terms of this Software License Agreement shall control.
MICROSOFT CORPORATION NOTICES
1. This product may incorporate intellectual property owned by Microsoft Corporation. The terms and conditions upon which Microsoft is licensing such intellectual property may be found at http://go.microsoft.com/fwlink/?LinkId=52369.
2. This product is based on Microsoft Print Schema technology. You may find the terms and conditions upon which Microsoft is licensing such intellectual property at http://go.microsoft.com/fwlink/?LinkId=83288.
EU9-0014-EN
Win7USB3 — интеграция драйверов USB3 в дистрибутив Win7 — simplix.info
Программа позволяет интегрировать драйвера USB 3.0 и 3.1 в дистрибутивы Windows 7 SP1 x86-x64 и Windows 2008 R2 SP1 x64
Особенности работы:
Поскольку все драйвера Intel USB 3.0-3.1 не могут быть корректно интегрированы официально, здесь применяется другой способ — во время установки системы сканируется оборудование и устанавливаются только те драйвера USB3, которые нужны именно этому компьютеру. Программа не конфликтует с другими интегрированными драйверами независимо от их версий. Работает очень быстро и безопасно, а главное — теперь Windows 7 можно установить с флешки на любое железо.
Интеграция рассчитана только на дистрибутив системы в install.wim. Чтобы USB-порты работали на первом этапе установки, нужно использовать boot.wim от Win8 и выше.
Чтобы установить драйвера в уже установленную систему, в которой не работают порты USB3, достаточно загрузиться в WinPE, запустить Win7USB3 и указать раздел с системой (например диск C). Или можно не загружать WinPE (например клавиатура и мышка работают), переименовать файл в Win7USB3+.exe и запустить, тогда вместо диалога интеграции необходимые драйвера будут установлены.
Версии драйверов:
- AMD USB 3.0 v1.1.0.276
- AMD USB 3.0 v2.0.0.60
- AMD USB 3.1 v1.0.0.12
- AMD USB 3.1 v1.0.5.3
- ASMedia USB 3.0 v1.14.10
- ASMedia USB 3.0+3.1 v1.16.41.3
- ASMedia USB 3.0+3.1 v1.16.59.1
- Etron USB 3.0 v0.0.0.118
- Fresco Logic USB 3.0 v3.6.9.0
- Intel USB 3.0 v1.0.10.255
- Intel USB 3.0 v2.5.0.19
- Intel USB 3.0 v3.0.0.33
- Intel USB 3.0+3.1 v5.0.4.43
- Intel USB 3.1 v17.2.70.3
- Renesas Gen1 USB 3.0 v2.1.39.0
- Renesas Gen2 USB 3.0 v3.0.23.0
- Texas Instruments USB 3.0 v1.16.6.0
- VIA USB 3.0 v6.1.7600.5601
- Неофициальные AMD и Intel
Способы интеграции:
- Запустить Win7USB3 и указать папку со смонтированной системой (обычный режим), или
- Передать Win7USB3 путь к смонтированной системе в командной строке (тихий режим)
- В тихом режиме можно отслеживать успешность интеграции по коду возврата, 0 = успех
- Для обновления пакета драйверов достаточно интегрировать новую версию
Скачать: Win7USB3 2.0 [7 MB]
Обсуждение на форуме
| Ежегодная проверка и проверка старых водительских записей (проверка на наличие нарушений, дорожно-транспортных происшествий и показателей безопасности) | Изучите историю вождения каждого заявителя, чтобы убедиться, что у них есть приемлемый стаж безопасного вождения за последние три года. Что касается существующих сотрудников, регулярно проверяйте водительские записи и показатели безопасности, поскольку обстоятельства могут измениться. Учитывайте как можно больше информации о драйверах. Это может включать нарушения, несчастные случаи и показатели безопасности. Эта информация будет содержать все известные нарушения, независимо от того, являются ли они частью официальной записи, которая ведется государством, а также любую другую информацию, которая указывает на то, что водитель проявил пренебрежение к безопасности населения. Убедитесь, что соискатели и нынешние сотрудники не имеют более трех незначительных нарушений движения или незначительных предотвратимых несчастных случаев за последние три года.Кроме того, убедитесь, что в течение последних пяти лет у них не было серьезных нарушений переезда, лишения лицензии, серьезных предотвратимых несчастных случаев или правонарушений, связанных с наркотиками / алкоголем. | Опыт вождения | Для небольших транспортных средств выберите человека, имеющего как минимум годичный проверяемый опыт эксплуатации аналогичного транспортного средства. Для крупногабаритных транспортных средств, коммерческих грузовиков и специализированных предприятий требуется не менее двух лет предыдущего опыта работы с конкретными транспортными средствами и обучения. ПРИМЕЧАНИЕ. Водители моложе 21 года подвергаются повышенному риску из-за отсутствия опыта. Этих водителей не следует рассматривать для выполнения критических операций, таких как управление более крупными транспортными средствами или транспортировка других. | Медицинский осмотр / физическая подготовка | Получите подтверждение от лицензированного, сертифицированного и зарегистрированного медицинского эксперта, что водитель физически квалифицирован для вождения (т.e. при необходимости убедитесь, что заявитель может управлять автомобилем в течение длительного времени). Также убедитесь, что соискатели и сотрудники не используют какие-либо лекарства, которые могут помешать им безопасно управлять транспортными средствами. | Лицензирование | Убедитесь, что у водителей и соискателей есть действующие водительские права. Для больших коммерческих грузовиков и автобусов убедитесь, что у водителя есть все необходимые сертификаты и нет лицензионных ограничений, ограничивающих его способность управлять транспортным средством. Запретить сотруднику управлять транспортным средством на работе, если есть какие-либо вопросы относительно действительности его или ее водительских прав. | Тестирование на наркотики и алкоголь | Создайте программу тестирования на наркотики и алкоголь для нынешних сотрудников, которые управляют транспортными средствами на работе. Программа должна включать компоненты и конкретные положения (например, тесты на наркотики и алкоголь будут / могут проводиться при обоснованном подозрении, послеаварийные, случайные, возвращающиеся к работе и / или последующие тесты). |
Выбор | НИРН
Определение
Теперь давайте посмотрим на драйвер компетенций, Selection, через призму активной реализации. Отбор относится к целенаправленному процессу набора, собеседования и найма « с учетом конечной цели». Выбор через призму активной реализации включает в себя определение навыков и способностей, которые являются предварительными условиями и / или специфичными для инновации или программы, а также атрибутов, которые трудно обучить и обучить.Давайте посмотрим, как процессы набора, собеседования и отбора поддерживают высокое качество реализации, что приводит к большей точности и улучшенным результатам.
Обоснование
С точки зрения активного внедрения процесс выбора имеет решающее значение для успеха программы. Выбор с точки зрения активной реализации отличается от выбора , как обычно, двумя важными способами:
- Выбор рассматривается как «взаимный» процесс. То есть школа или округ решают, следует ли выбрать человека для присоединения к ним. и процесс позволяет заявителю понять ожидания, связанные с должностью.
- Отбор включает в себя процессы «ролевой игры» или «репетиции поведения». Эти процессы позволяют интервьюерам наблюдать, как кандидаты реагируют на обратную связь и насколько они способны и хотят изучать новые методы. Этот процесс дает представление о том, как кандидат может отреагировать на отзывы и данные.Желание и способность учиться и расти имеют решающее значение для постоянного улучшения.
Основные функции
Процесс отбора — это важная возможность, которая позволяет новым сотрудникам и переназначенным сотрудникам четко понимать требования к должности и способы работы и принимать собственное решение о том, подходят ли им программы, практики и процессы непрерывного улучшения. Подробный и реалистичный обзор позиции помогает кандидату решить, готовы ли они к этой задаче.Этот процесс также дает возможность выбрать определенные черты или характеристики — те, которые может быть сложно поддерживать с помощью обучения и коучинга. Например, такие характеристики, как видение родителей как партнеров в образовательном процессе или готовность нести ответственность за результаты. Информация, собранная в процессе отбора, может быть передана тренерам и тренерам, чтобы помочь им понять сильные стороны человека и быстрее сосредоточиться на областях, которые могут потребовать внимания.
(PDF) Мнение водителей о системе выбора драйверов и возможных новых моделях в Испании
123 Франсиско Алонсо и др .: Мнение водителей о системе выбора драйверов и возможных новых моделях в Испании
[4] C. К. Ван, К. Дж. Косински, Дж. Г. Шварцберг, А. В.
Шанклин. «Руководство для врача по оценке и консультированию
для пожилых водителей». Вашингтон, округ Колумбия: Национальная служба безопасности дорожного движения
, 2003 г.DOT HS 809–647.
[5] Б. Сендалес, С. А. Усече, В. Гомес. «Психосоциальная работа
Факторы, артериальное давление и психологическое напряжение у операторов мужского автобуса
». Промышленное здоровье, 2014 г .; 52 (4): 279-288. DOI:
10.2486 / indhealth.2013-0156.
[6] Б. Сендалес, С. А. Усече, В. Гомес, Х. П. Бокареджо. «Реакция операторов шины
на нагрузку на рабочем месте: экспериментальное испытание модели
— модель управления спросом на работу».Журнал профессиональной
Психология здоровья. Предварительная онлайн-публикация.
http://dx.doi.org/10.1037/ocp0000040.
[7] Р. Прада, М. К. дель Рио, Ф. Х. Альварес Гонсалес. «Предъявление
процессов патологии на испанском языке: su
релевантность ан эль кампо де ла seguridad vial». Rev Esp Salud
Pública, 1995; 69: 499-508.
[8] BOE (Официальный государственный вестник Испании) № 13, 8 июня
th
, Royal
Указ 818/2009 от 8 мая
th
.Приложение 4, разд. I, 2009; 48125-
48142.
[9] Официальный журнал Европейского Союза L403 / 18, Директива
2006/126 / CE Европейского парламента и Совета,
от 20 декабря
-го
, 2006
[10] BOE (Официальный государственный вестник Испании) № 54, 3 марта
rd
, Royal
Указ 170/2010 от 19 февраля
th
. A-2010-3471, 2010;
20695-20715.
[11] DGT (General Traffic Division of Spain) и Universidad de
Valladolid / Departamento de Farmacología (University of
Valladolid / Pharmacology Deparment), Guía de prescripción
farmacológica vial9, 2003
[12] MC del Río, FJ Álvarez González. «Лекарства
и пригодность к вождению». Фармаоэпидемиология и лекарства, 2003; 12:
389-394.
[13] Американская психиатрическая ассоциация.Диагностико-статистическое руководство
по психическим расстройствам: DSM-IV [Интернет]. 4-е изд.
Вашингтон (округ Колумбия): Американская психиатрическая ассоциация; 1994
[цитировано 8 июля 2016 г.]. 866 с. Доступно по телефону:
http://www.psychiatryonline.com/DSMPDF/dsm-iv.pdf.
[14] М. К. дель Рио, Ф. Х. Альварес. «Незаконные наркотики и способность водить машину: оценка
в Испанских медицинских центрах тестирования вождения». Наркотики
и алкогольная зависимость, 2001; 64: 19-25.
[15] Ф. Х. Альварес, И. Фиерро, А. Викондоа и др. «Оценка пригодности к вождению
у водителей с неврологическими расстройствами в медицинских центрах тестирования водителей
». Циркуляционный журнал, 2007; 71: 1800-1804.
[16] М. Т. Гомес-Талегон, И. Фиерро, А. Викондоа и др. «Фитнес
для проведения оценки водителей с неврологическими расстройствами в
медицинских центрах тестирования водителей». Журнал неврологии, 2007;
45: 526-531.
[17] К. Де лас Куэвас, Э. Х. Санс. «Пригодность к вождению психиатрических
больных». Помощник по первичной медико-санитарной помощи в Journal of Clinical
Psychiatry, 2008; 10: 384-390.
[18] C. Ryff. «За пределами Понсе де Леона и удовлетворение жизнью: новые направления
в поисках успешного старения». Международный журнал
по поведенческому развитию, 1989a; 12; 35-55.
[19] C. Ryff. «Счастье — это все, или нет? Исследования
значения психологического благополучия ».Журнал личности
и социальной психологии, 1989b; 57: 1069-1081.
[20] G. L. Odenheimer. «Безопасность водителя у пожилых людей». Роль врача
в оценке навыков вождения у пожилых пациентов.
Гериатрия, 2006; 61: 14-21.
[21] Т. М. Меузер, Д. Б. Карр, Г. Ф. Ульфарссон. «История аварий автомобилей
и результаты лицензирования для пожилых водителей
, признанных инвалидами по состоянию здоровья в штате Миссури».Accid Anal
Предыдущая, 2009; 41 (2): 246–252. DOI: 10.1016 / j.aap.2008.11.003.
[22] Б. М. Доббс, Д. Карр, Дж. Эберхард и др. «Определение
по состоянию здоровья водить машину: руководство для врачей». Американская
Ассоциация автомобильной медицины / Национальная автомагистраль
Консенсусное совещание ассоциации безопасности транспорта
Руководящие принципы, 2000.
[23] Ф. Алонсо, К. Эстебан, К. Калатаюд, Б. Аламар, А. Эгидо.
«Флакон салуда». Teoría y prácticas de los trastornos físicos y
psíquicos en la Conducción. Cuadernos de Reflexión Attitude,
2008.
[24] Ф. Х. Альварес, И. Фиерро, М. Т. Гомес-Талегон, А. Викондоа,
и др. «Пациенты с синдромом обструктивного апноэ сна
и оценка пригодности к вождению в клинической практике
в Испании в медицинских центрах трафика». Дорожное движение
Травма, 2008 г .; 9: 168-172.
[25] К. Де лас Куэвас. «Психическое заболевание, лечение наркозависимости и приспособленность
к вождению». В Хеннесси Д. (ред.): Психология дорожного движения и международная перспектива
. Прогресс психологических исследований,
2011; 21-36.
[26] Г. О. Хитосуги. Токудоме, «Внезапная болезнь во время вождения автомобиля
— ретроспективный анализ коммерческих водителей в
Японии». Scand J. Work Environ Health, 2012 г .; 38: 84-87.
[27] F.Алонсо, К. Эстебан, С. А. Усече, А. Серж. «Восприятие
влияния определенных состояний здоровья на вождение
производительности». Public Health International, 2017; 2 (1), 1-7.
DOI: 10.11648 / j.phi.20170201.11.
[28] С. А. Усече, А. Серж, Ф. Алонсо. «Рискованное поведение и
индикаторов стресса между новичками и опытными водителями».
Американский журнал прикладной психологии, 2015 г .; 3 (1): 11-14.
[29] Транспортное агентство Новой Зеландии, Медицинские аспекты пригодности к вождению.Руководство для практикующих врачей
. Правительство Новой Зеландии, 2009 г.
[30] С. А. Усече, Б. Сендалес, В. Гомес. «Измерение утомляемости и
ее связи со стрессом на работе, здоровьем и дорожно-транспортными происшествиями
у профессиональных водителей: пример операторов BRT». EC
Неврология; 2017, 4 (4), 103-118.
[31] Ф. Алонсо, К. Эстебан, С. А. Усече, Э. Лопес де Козар.
«Распространенность симптомов физической и психической усталости у
испанских водителей и их влияние на безопасность вождения».
Достижения психологии и неврологии, 2016; 1 (2), 10-18.
DOI: 10.11648 / j.apn.20160102.12.
[32] С. А. Усече, Ф. Алонсо, Б. Цендалес, Р. Аутукевичюте, А.
Серж. «Выгорание, рабочее напряжение и дорожно-транспортные происшествия в сфере общественного транспорта
: на примере водителей городских автобусов». Журнал
Экологические и профессиональные науки; 2017 [Предварительная публикация
].
[33] Г. Мэтьюз, Л.Дорн, Т. В. Хойс, Д. Р. Дэвис, А. I
Глендон, Р. Г. Тейлор. «Стресс и производительность водителя на симуляторе вождения
». Человеческий фактор, 1998; 40 (1): 136-149. DOI:
10,1518 / 001872098779480569.
Модель выбора полосы движения, основанная на взаимодействии фазового поля и многопользовательской динамической игре с неполной информацией
Интеллектуальное вождение — эффективное средство для достижения активной безопасности автомобиля, а точное прогнозирование ситуации группы транспортных средств является предпосылкой для достижения интеллектуального вождение автомобиля.Выбор полосы движения и смена полосы движения являются не только наиболее фундаментальными причинами трансформации групповой ситуации транспортных средств, но также и основным содержанием исследований поведения водителя в теории транспортных потоков. В этом документе с учетом предыстории Интернета вещей ситуация в группе транспортных средств была всесторонне рассмотрена на основе факторов, влияющих на поведение водителя. Поведение водителя при выборе полосы движения было проанализировано в условиях неполной информации, и модель выбора полосы движения, основанная на связи фазового поля и многопользовательской динамической игре с неполной информацией, была построена с учетом изменяющегося во времени характера склонности к вождению.Для проверки модели использовались средства реального эксперимента по вождению, виртуального эксперимента по вождению и микроскопического моделирования транспортного потока. Результаты проверки показали, что построенная в данной статье модель может объективно отражать реальную характеристику работы транспортного потока на участке дороги и процесс выбора полосы движения. Теоретической основой исследования выбора полосы движения может быть интеллектуальное вождение, особенно антропоморфное вождение в условиях Интернета вещей.
1. Введение
С быстрым развитием транспортной отрасли количество владельцев автомобилей быстро увеличивалось. Противоречие между людьми, транспортными средствами и окружающей средой становится все более заметным, а безопасность дорожного движения становится все более серьезной. Смена полосы движения является одним из основных факторов, влияющих на безопасность движения, и выбор полосы движения, при котором водители должны анализировать все виды информации и мгновенно учитывать множество факторов, является важной предпосылкой для смены полосы движения, и рациональность выбора полосы движения напрямую связана к безопасности вождения.Информацию из нескольких источников о людях, транспортных средствах и окружающей среде можно собирать и передавать через Интернет вещей, что может обеспечить основу для принятия решений при выборе полосы движения водителем и повысить активную безопасность водителя и транспортного средства. Поэтому глубокое изучение поведения выбора полосы движения в условиях Интернета вещей имеет большое практическое значение. И теоретическая основа исследования выбора полосы движения может быть предоставлена для интеллектуального вождения, особенно для антропопатического вождения.
Многие ученые прилагали постоянные усилия к исследованию модели смены полосы движения. Гиппс [1] построил модель смены полосы движения, чтобы охватить городскую дорожную ситуацию, когда светофоры, препятствия и тяжелые автомобили — все это оказывало влияние. QI YANG et al. [2] и Ахмед К.И. [3] разделили поведение при смене полосы движения на три части, а именно: создание намерения сменить полосу движения, определение условий и выполнение смены полосы движения. M.Rickert et al. [4] представили модель смены полосы движения, основанную на подходе клеточных автоматов в условиях двухполосного движения.Основная схема модели состоит в том, чтобы определить, есть ли препятствие в полосе движения, где находится целевой автомобиль, и есть ли достаточный промежуток в соседней полосе движения. Хидас [5] классифицировал маневры на свободные, вынужденные и совместные смены полосы движения в условиях загруженного движения. И была разработана модель смены полосы движения, основанная на концепции интеллектуального агента. Мехди Кейван-Экбатани и др. [6] исследовали процесс принятия решения о маневрах при смене полосы движения для различных водителей на основе двухэтапного тест-драйва на автострадах.Эмпирическим путем были обнаружены четыре различные стратегии, а именно: опережение скорости, опережение и обгон, движение по полосе и движение вперед. Esmaeil Balal et al. [7] представили систему нечеткого вывода (FIS), которая моделирует двоичное решение водителя выполнять или не выполнять дискреционное движение по смене полосы движения на автострадах. Yugong Luoet al. [8] предложил динамический маневр автоматической смены полосы движения. Ключевыми технологиями для этого маневра были планирование траектории и отслеживание траектории. Задача планирования была преобразована в задачу оптимизации с ограничениями в методе планирования траектории, и эталонная траектория, удовлетворяющая требованиям безопасности, комфорта и эффективности движения, была рассчитана и обновлена, чтобы завершить автоматическую смену полосы движения и избежать потенциальных столкновений.Shengbo Li et al. [9] представили четырехкомпонентную структуру для моделирования, анализа и синтеза взвода CAV с точки зрения многоагентного консенсусного управления. Систематически вводился метод моделирования четырехкомпонентного фреймворка, обсуждались основные показатели производительности и представлялась конструкция распределенного контроллера.
Вождение по дороге — это динамичный игровой процесс, и многие ученые изучали поведение водителя при смене полосы движения с точки зрения теории игр.Хидеюки Кита [10] разработал некооперативную теоретическую модель игры двух лиц с ненулевой суммой для описания взаимодействий автомобилей в сливающихся или переплетающихся секциях, и при анализе учитывалось только влияние сквозной машины на поведение объединяющейся машины. И объединяющиеся, и сквозные машины будут пытаться предпринять наилучшие действия для себя, прогнозируя действия друг друга, соответственно. Peng Jinshuan et al. [11] обсудили некооперативную смешанную стратегическую игру между целевым транспортным средством и следующим транспортным средством на целевой полосе и глубоко проанализировали выигрыши игроков и равновесие по Нэшу.Алиреза Талебпур и др. [12] предложили игровую модель отказа от взаимодействия двух человек с ненулевой суммой для анализа взаимодействия между целевым транспортным средством и следующим транспортным средством, которое находится на целевой полосе. Модели смены полосы движения с полной и неполной информацией были установлены соответственно в зависимости от того, были ли они оснащены связью V2V. Чжан Юаньлян [13] предложил дискреционную модель смены полосы движения, основанную на игре Штакельберга, и изучил игровой процесс целевого транспортного средства и следующего транспортного средства на целевой полосе.Основываясь на оптимальном управлении удаляющимся горизонтом и теории динамических игр, Meng Wang et al. [14] предложили прогнозирующий подход для унифицированной смены полосы движения и контроля за автомобилем. В предлагаемом подходе дискретные решения о смене полосы движения и непрерывные ускорения оценивались совместно, чтобы минимизировать функцию выигрыша и получить равновесное решение по Нэшу.
Недостатки предыдущих исследований по смене полосы движения в основном заключаются в следующем. Во-первых, склонность к вождению, особенно изменяющаяся во времени склонность к вождению, не полностью учитывалась в предыдущих исследованиях.Пристрастие к вождению будет меняться в зависимости от дорожной обстановки и ситуации группы транспортных средств. Различные водители различаются по аспектам ожидаемой скорости, ожидаемого расстояния, предпочтения выигрыша по весу и даже степени восприятия информации и владения информацией о транспортной среде. Во-вторых, в существующих исследованиях редко принимаются во внимание типы транспортных средств и многополосная среда. Различные типы транспортных средств по-разному влияют на водителей. А в многополосной среде состав пропорций типа транспортного средства будет более сложным, тип склонности водителя будет более разнообразным, а частота смены полосы движения будет выше.В-третьих, в существующей модели изменения полосы движения, основанной на теории игр, строится только статическая игровая модель для двух человек, которая находится между транспортным средством для смены полосы движения и следующим транспортным средством на целевой полосе. Было проанализировано интерактивное влияние двух транспортных средств, но игнорировалось влияние стратегий выбора полосы движения окружающих транспортных средств. В-четвертых, степень полноты информации, полученной водителем, редко учитывается в предыдущей модели смены полосы движения, основанной на теории игр. Степень полноты изучения и усвоения информации водителями будет разной в зависимости от уровня развития Интернета вещей.
Ориентируясь на проблемы предыдущих исследований, в качестве объекта исследования были выбраны группы транспортных средств, движущихся по городской скоростной автомагистрали, и проанализирована ситуация группы транспортных средств на фоне Интернета вещей. На этой основе была построена модель выбора полосы движения водителем на основе связи фазового поля и многопользовательской динамической игры с неполной информацией с учетом влияния изменяющейся во времени склонности к вождению. Выплаты каждого игрока были проанализированы, чтобы получить стратегию выбора полосы движения для водителя.
2. Метод
Перед построением модели выбора полосы движения была определена ситуация группы транспортных средств и построено ее математическое описание. И типы ситуаций групповой техники были определены после разделения и сокращения. На основе игрового анализа поведения водителя при выборе полосы движения была построена модель выбора полосы движения, основанная на взаимодействии фазового поля и многопользовательской динамической игре с неполной информацией.
2.1. Ситуация группы транспортных средств
Дорожная ситуация относится к состояниям и ситуациям развертывания и поведения всех транспортных объектов в зоне, чувствительной к интересам водителя (зона, чувствительная к интересам, относится к области, которая оказывает большее влияние на безопасность транспортного средства и привлекает больше внимания водителя) , и он содержит всю информацию об объекте трафика [15, 16].В этом документе ситуация группы транспортных средств, в которой водитель может воспринимать в чувствительной к интересам области, включая характеристики объекта движения и взаимосвязь группы транспортных средств, а также учитывая макроскопические характеристики плотности и скорости, была взята в качестве примера для исследования полосы движения водителя. поведение выбора.
2.1.1. Определение ситуации группы транспортных средств
Как показано на рисунке 1, в качестве примера было взято трехполосное состояние на городской скоростной автомагистрали, в качестве объекта исследования выбрано целевое транспортное средство (если не указано иное, случай целевого транспортного средства, расположенного в средней полосе движения, считается взято в качестве примера), а чувствительная к интересам область делится на левую переднюю, левую заднюю, переднюю, заднюю, правую переднюю и правую заднюю части в соответствии с положением переднего бампера целевого транспортного средства.Целевое транспортное средство, левое переднее транспортное средство, лево-заднее транспортное средство, переднее транспортное средство, заднее транспортное средство, правое переднее транспортное средство и правое заднее транспортное средство были выбраны в качестве игроков для анализа и построения модели выбора полосы движения водителем. Следующие передние или следующие задние машины не включались в игру, и они учитывались только при расчете выигрыша за вождение.
2.1.2. Математическое описание группы транспортных средств
Во время выбора полосы движения водители, как правило, радикально сосредотачиваются на эффективности движения, склонны менять левую сторону и в основном принимают во внимание среднюю скорость транспортного средства; консервативные водители делают ставку на комфорт, склонны правильно менять и в основном учитывают плотность транспортного потока.Таким образом, при разработке математического описания групповой ситуации транспортных средств необходимо учитывать два макроскопических параметра: плотность и скорость. Между тем, в микроскопическом аспекте интерактивное влияние на окружающие транспортные средства будет учитываться, когда водитель принимает решение о смене полосы движения. На понятие «сила» в физике можно ссылаться, а описание интерактивных отношений между транспортными средствами можно абстрагировать до силы взаимодействия.Таким образом, ситуация группы транспортных средств, в которой находится целевое транспортное средство, может быть абстрактно описана посредством набора силы полосы движения, принятой целевым транспортным средством во взаимосвязи группы транспортных средств. И если транспортное средство в подобласти оказывает положительное влияние на целевое транспортное средство, чтобы выбрать полосу, в которой находится подобласть, тогда сила считается притяжением, а обратный эффект определяется как отталкивание. Величина эффекта использовалась для описания величины силы, а величина эффекта наибольшего отталкивания была представлена как -1, тогда как величина эффекта наибольшего притяжения была представлена как 1 (таблица 1).
Для классов [17, 18] использовался метод нечеткой логики размер эффекта, в котором тип транспортного средства (малый, средний, большой), относительное расстояние (опасность, ближний, средний, дальний), относительная скорость (отрицательное большое, отрицательное маленькое, ноль, положительное маленькое, положительное большое), трафик c Плотность потока на каждой полосе (Малая, Средняя, Большая), средняя скорость каждой полосы (Большая, Средняя, Малая) и склонность водителя к целевому транспортному средству (Радикальная, Обычная, Консервативная) были всесторонне рассмотрены.В методе нечеткой логики нечеткие переменные, соответствующие нечеткие множества и расчет граничного значения нечеткого подмножества могут ссылаться на литературу [19]. Ограничено пространством, только одно из типичных нечетких правил языка было перечислено ниже. Если тип целевого транспортного средства небольшой, тип транспортного средства с левой задней частью невелик, склонность водителя целевого транспортного средства к вождению радикальна, относительное расстояние между целевым транспортным средством и лево-задним транспортным средством большое, а их относительная скорость положительна большой, плотность транспортного потока в левой полосе мала, а средняя скорость в левой полосе велика, тогда величина воздействия лево-заднего транспортного средства на целевое транспортное средство равно 1. Сила, которую заднее левое транспортное средство действовала на целевое транспортное средство, может быть получена на основе описанного выше метода. Точно так же может быть получена сила, с которой каждое транспортное средство в чувствительной к интересам области действовало на целевое транспортное средство, и сила, которую оно получило. Сила, установленная для целевого транспортного средства, может быть выражена как = [сила переднего транспортного средства, сила заднего транспортного средства, сила лево-переднего транспортного средства, сила лево-заднего транспортного средства, сила правого переднего транспортного средства, сила правого заднего транспортного средства] =. Точно так же можно выразить силу, установленную для других транспортных средств в зоне, чувствительной к интересам. Учитывая, что доля транспортных средств, расположенных в разных областях, была разной, коэффициент воздействия, который воспринимал целевой водитель транспортного средства, можно рассматривать как вес соответствующей силы для расчета силы, которую каждая полоса действовала на целевое транспортное средство путем взвешенного суммирования. . Доля транспортных средств в каждой подобласти, которую воспринимал водитель с разными типами склонностей, может быть получена с помощью процесса аналитической иерархии на основе анкетного опроса.Результат показан в Таблице 4. В Таблице 4 представлена ставка участия транспортного средства, которое находится в подобласти для целевого транспортного средства. Например, представлена ставка участия транспортного средства в передней зоне для целевого транспортного средства, когда оно находится в левой полосе движения. Следовательно, сила полосы движения, в которой находилось целевое транспортное средство, была силой левой полосы движения, силой правой полосы движения, а затем математическое описание групповой ситуации транспортных средств, в которой находилось целевое транспортное средство.Точно так же можно рассчитать групповую ситуацию, в которой находятся другие автомобили. 2.1.3. Разделение и сокращение группы транспортных средств СитуацияКогда целевая машина находится на левой или правой полосе, силы от соседней полосы и отделенной полосы могут быть объединены для получения силы боковой полосы. Следовательно, ситуация группы транспортных средств будет иметь, и типы, соответственно, когда целью является транспортное средство, расположенное в левой, средней и правой полосе движения, и всего будет 16 типов.Притяжение обозначается знаком «+», а отталкивание — знаком «-». Таким образом, 16 типов групповой ситуации транспортных средств показаны на рисунке 2. 2.1.4. Идентификация групповой ситуации транспортных средствТипы групповой ситуации транспортных средств в разное время должны быть идентифицированы из-за изменяющихся во времени характеристик. Основой для определения групповой ситуации транспортных средств являются пространственно-временное местоположение транспортных средств в зоне, чувствительной к интересам, и сила, которую приняла транспортное средство-цель.Процесс идентификации ситуации группы транспортных средств, в которой нацелено транспортное средство, находящееся в трехполосном режиме, показан на рисунке 3. 2.2. Модель выбора полосы движения водителем, основанная на взаимодействии фазового поля и многопользовательской динамической игре с неполной информациейТеория игр может анализировать ситуацию с интерактивным влиянием нескольких людей. Во-первых, выбор полосы движения для водителя — это процесс преследования интересов, таких как безопасность, эффективность и комфорт вождения.Водителю целевого транспортного средства необходимо учитывать влияние стратегий выбора полосы движения, которые учитывают окружающие его водители транспортных средств. И необходимо построить модель многопользовательской динамической игры. Во-вторых, в реальной ситуации существуют различия в степени полноты информации и использовании взаимосвязанных устройств, которыми оснащено транспортное средство. Следовательно, степень полноты информации, которую можно было бы получить по водителям, будет разной. Поэтому необходимо изучить поведение водителя при выборе полосы движения в условиях неполной информации.В-третьих, при нормальных обстоятельствах динамическая игра с несколькими людьми является относительно сложной, и не обязательно существует равновесное решение, часто достигающее состояния удовлетворенности каждого игрока. Таким образом, удовлетворительное решение модели может быть найдено. В-четвертых, предпочтение при вождении, а именно склонность к вождению, относится к предпочтению выбора полосы движения в различных ситуациях группы транспортных средств. Предпочтение решения будет различным для разных типов водителей и будет меняться с динамическими изменениями состояния группы транспортных средств.Следовательно, для более точного моделирования дорожных ситуаций при построении модели следует учитывать изменяющуюся во времени склонность к вождению. В заключение, модель, основанная на взаимодействии фазового поля и многопользовательской динамической игре с неполной информацией, может быть построена с учетом групповой ситуации транспортных средств и изменяющейся во времени склонности к вождению, чтобы изучить модель выбора полосы движения, адаптированную к условиям Интернета вещей. , особенно модель выбора полосы движения для интеллектуальных транспортных средств. 2.2.1. Игровой анализ поведения выбора полосы движенияНа рисунке 1 у транспортных средств, и в средней полосе были три стратегии поведения, а именно: изменение влево ( CL ), без изменения ( NC ) и изменение вправо ( CR ). Транспортные средства и в левой полосе движения имели две стратегии поведения, а именно NC и CR . И автомобили, и в правой полосе имели две стратегии поведения, а именно NC и CL .В реальной игре по выбору полосы движения транспортные средства оснащены только частично соединенными между собой устройствами, и может быть получена только частичная информация о типе транспортного средства, относительном расстоянии, относительной скорости и соответствующем пространстве стратегии. Однако невозможно получить информацию о характеристиках других водителей и соответствующих выплатах за вождение. Поэтому в этой статье предполагается, что все водители, участвующие в игре по выбору полосы движения, получают неполную информацию. ( 1) Определение порядка действий водителей. В процессе динамической игры порядок действий игроков является последовательным, и игрок, который предпринимает действия позже, может получить информацию об игроках, которые действовали до него, наблюдая за их действиями. И на этой основе выводятся типы игроков, которые совершают действия до него, и корректируется априорное распределение вероятностей их типов, чтобы выбрать его оптимальное действие. В связи с тем, что радикальные водители с большей вероятностью выберут свои собственные действия раньше, чем консервативные водители, и, по сравнению с транспортным средством, находящимся сзади, транспортное средство, находящееся впереди, имеет приоритет для принятия мер.Таким образом, порядок действий водителей определяется на основе двух показателей: переднего или заднего положения в группе транспортных средств и радикальной степени склонности водителя. Как правило, водители имеют более высокий приоритет, чтобы действовать, когда их автомобили расположены впереди и склонность к вождению более радикальна. Метод в литературе [20, 21] использовался для определения склонности к вождению; в качестве склонности водителя был выбран тип склонности с наибольшей вероятностью.Конкретный процесс определения порядка действий драйверов показан на рисунке 4. ( 2) Внедрение скрытой марковской модели. Склонность водителя будет учитываться в каждом раунде игры, и она будет меняться вместе с окружающей средой, что повлияет на сознание водителя и манипуляционное поведение, а также на ситуацию группы транспортных средств. Таким образом, модель Скрытого Маркова была основана на двойном стохастическом процессе групповой ситуации транспортных средств и склонности к вождению, чтобы исследовать механизм трансформации склонности к вождению.Подробный процесс отсылается к литературе [22]. Наконец, формула для оптимизированной вероятности трансформации ситуации группы транспортных средств выглядит следующим образом: Алгоритм оптимизации распределения вероятностей склонности водителя выглядит следующим образом: Алгоритм оптимизации распределения вероятностей исходной ситуации группы транспортных средств состояние выглядит следующим образом: ( 3) Расчет управляющего вознаграждения. После выбора игровых стратегий игроков будет определена ситуация в игре и соответствующая функция выплаты.Преимущества выбора водителя можно измерить с точки зрения безопасности, эффективности и комфорта вождения. ( a) Расчет выплаты по безопасности вождения. Вознаграждение за безопасность вождения (выраженное посредством) относится к изменению интегрированной силы (взвешенное суммирование сил, которые транспортное средство в каждой подобласти действовало на целевое транспортное средство), которое транспортное средство получило до и после выполнения выбранной операции. Целевое транспортное средство было выбрано в качестве примера, и коэффициент вклада (как показано в Таблице 3), которое воспринималось целевым транспортным средством, был представлен как вес соответствующей силы, на которую действовали транспортные средства в каждой подобласти.Перед выполнением выбранной операции интегрированное усилие, которое получило целевое транспортное средство, равнялось, а после выполнения выбранной операции интегрированное усилие также могло быть получено таким же образом. Тогда выигрыш по безопасности вождения, который получил целевой автомобиль, был. Точно так же интегрированные силы, которые транспортное средство в каждой подобласти получило до и после выполнения выбранной операции, соответственно, были и, а соответствующая отдача от безопасности вождения была.
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Ваш комментарий будет первым