Лучший GPS-навигатор для таксиста
Какие требования продажа GPS навигаторов предъявляет к своим устройствам для работы в такси?
- Подробные, детальные, только самые лучшие карты
- Вывод информации и проблемах с движением по пути
- Хороший маршрутный компьютер
- Функции интернета и беспроводной связи
Детальные и точные карты
Карты для профессионального использования мало чем отличаются от обычных, которыми пользуются простые водители. Но таксисты знают, какую программу удобнее использовать и всегда устанавливают актуальные версии карт.
Для поездок по некрупным городам лучше положиться все-таки на автомобильные навигаторы с картами Garmin, как на наиболее распространенную программу для навигации, у которой самые подробные карты дорог всей России. Также можно пользоваться картами, которые предоставляют нам сервисы от Яндекса или Гугла, они пока для навигаторов не очень хорошо подходят, но могут помочь человеку с компьютером найти себя на карте города и сообразить куда нужно идти.
Показ пробок
Удобство работы с этой функцией это одна из особенностей GPS навигаторов Garmin. Информация о заторах на автодороге актуальна для городов-миллионников, например, таких как Москва, Петербург, чуть меньше она важна для Уфы, Челябинска, Казани, Екатеринбурга.
Обязательное для хорошего навигатора условие — наличие функции показа пробок на дороге. Ведь основная проблема навигации в городе — проехать куда нужно без того, чтобы стоять в заторах. Некоторые навигаторы не имеют этой функции, за то они чуть дешевле. Обращайте внимание при выборе устройства на этот момент, если собираетесь часто ездить по городу. Если вы будете путешествовать по дорогам вне города, где пробок не бывает, тогда можно пренебреч этой функциней навигатора.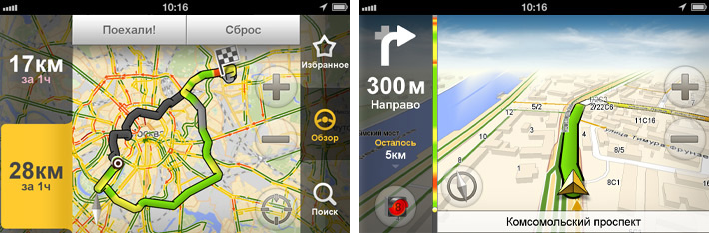
Маршрутный компьютер
Подавляющее большинство программ для навигации позволяют человеку видеть на экране время и расстояние до точки назначения и до поворотов, это сильно помогает при движении по маршруту. В настройках параметров такой программы для навигации, как Навител Навигатор, есть даже возможность выбора типа транспорта, в том числе и такси, эта настройка оптимизирует работу системы именно для переездов в такси. В большинстве навигаторов от Garmin такого нет.
▷ Вебор устройства для работы с Яндекс Такси
Сегодня для работы таксистом недостаточно иметь современный автомобиль и хорошо водить. Кроме того, необходимо устройство, отвечающее за взаимосвязь с онлайн-сервисом такси. Производители предлагают широкий выбор многофункциональных девайсов, на далеко не все они подходят для решения поставленной задачи. Учитывая актуальность проблемы, давайте выясним, каким критериям должен соответствовать смартфон для работы в «Яндекс.Такси».
Почему важно выбрать правильный мобильный телефон
Сотрудничество с онлайн-сервисом «Яндекс.Такси» ведется через специальное устройство, без которого водитель не сможет войти в систему. Телефон должен корректно отражать местоположение таксиста. За эту функцию отвечает навигатор, качество работы которого напрямую зависит от модели смартфона или планшета. Устройство должно соответствовать ряду параметров:
- обеспечивать бесперебойный доступ в Сеть;
- иметь высокую скорость интернета. Данный параметр определяется не только техническими особенностями смартфона, но и качеством работы провайдера, а также особенностями соединения в определенном районе;
- оперативно выполнять команды. От скорости напрямую зависят количество принятых заказов и итоговый заработок водителя;
- обеспечивать качественную работу GPS-модуля. Он отвечает за формирование оптимального маршрута, дает возможность получить новый заказ еще в процессе выполнения предыдущего.


Смартфон, который соответствует этим требованиям, носит название совместимого.
Требования к устройствам, основные критерии выбора
При подборе гаджета нужно учитывать не только его соответствие характеристикам, но и удобство для самого пользователя. Чем проще интерфейс, тем меньше времени понадобится водителю для изучения тонкостей работы устройства.
В процессе выбора определяющее значение имеют три параметра:
- программное обеспечение;
- аккумулятор;
- ширина экрана.
Рассмотрим подробнее особенности подбора.
Операционная система

Решая вопрос, какой планшет выбрать для работы в «Яндекс.Такси», необходимо учитывать объем оперативной памяти. Девайсы с емкостью менее 2 Гб не могут обеспечить быструю работу с большим количеством приложений, они «тормозят». Совершенно очевидно, что это негативно скажется на работе таксиста.
Аккумулятор
Задача батареи заключается в обеспечении беспрерывной работы приложений. Их функционирование требует немало энергии. Если на телефон или планшет установлен слишком слабый аккумулятор, то устройство быстро сядет. Для работы в такси лучше всего подходит аккумулятор с емкостью не менее 2 500 мАч. Только при таком условии гаджет будет приспособлен для функционирования в режиме нон-стоп. Также не будут лишними хорошая зарядка и дополнительный аккумулятор. Причем последний должен быть той же фирмы, что и телефон.
Ширина экрана
С этим параметром все предельно ясно. Чем шире экран, тем проще водителю воспринимать необходимую для работы информацию. Для удобства устройство крепится на передней панели автомобиля в непосредственной близости от лица таксиста. Широкая диагональ — лучший выбор, поскольку позволяет получить нужные сведения, почти не отвлекаясь от дороги.
Широкая диагональ — лучший выбор, поскольку позволяет получить нужные сведения, почти не отвлекаясь от дороги.
Некоторые водители приобретают специально для работы недорогой планшет. Но его спокойно можно заменить на бюджетный смартфон с диагональю не менее 4,5 дюйма.
Немаловажное значение имеет контрастность, чтобы таксист мог хорошо видеть путь при любом освещении. Звук устройства должен быть чистым и достаточно громким, чтобы уловить в уличном шуме сигнал очередного заказа.
Рекомендованный перечень
Рейтинг возглавляют устройства, которые идеально подходят для сотрудничества с онлайн-сервисом «Яндекс.Такси». Это модели брендов Huawei, Samsung, LG.
Если подойти к выбору устройства с точки зрения идеального соответствия критериям поиска, то список смартфонов для «Яндекс.Такси» включает следующие модели:
- Huawei Y5 2017, P10 lite, Honor 6A;
- LG X power;
- Samsung Galaxy J7, Galaxy A3, Galaxy A5, Galaxy A7, Galaxy J3.

Можно купить LG K8 или Lenovo A2010-a, но они чаще всего работают со сбоями.
Не подходят для таксистов телефоны Meizu и Xiaomi Redmi 4, 4А, 4Х, а также все «Айфоны». Данные рекомендации подготовлены на основании исследования, проведенного аналитиками «Яндекса».
Планшеты для работы в «Яндекс.Такси»
Перечень планшетов, обеспечивающих корректную работу таксометра, включает следующие модели: Huawei MediaPad, Samsung Galaxy Tab, а также Lenovo PHAB Plus. Частично совместимыми считаются Digma Plane 7.4 4G и Asus ZenPad C 7.0.
Поделиться ссылкой:
Uber – лучше, чем такси mod (unlocked)
Uber – лучше, чем такси это Карты и навигация Приложение для Android, разработанное компанией App for Android. Uber Technologies, Inc.. Загрузить последнюю версию программы (4.372.10002) из апка здесь, в apksmods освобожденный 16 февраля 2021 г.
Uber – лучше, чем такси mod (unlocked) была загружена 500 000 000+ с тех пор как 16 февраля 2021 г. . Бесплатно и размер файла — 107.26 MB. не предлагает в покупке приложений, пользователи оценили его 4/5 звёзды с более чем 6647215 показатели.
. Бесплатно и размер файла — 107.26 MB. не предлагает в покупке приложений, пользователи оценили его 4/5 звёзды с более чем 6647215 показатели.
Закажите поездку одним нажатием кнопки!
Uber — это приложение, которое помогает водителям и пассажирам найти друг друга за несколько минут. Вы можете быстро и надежно передвигаться по городу в любое время суток, больше не нужно парковаться, ждать такси или автобус. С Uber можно заказать поездку одним касанием и оплатить ее банковской картой или наличными в указанных городах.Uber — это решение на все случаи жизни для поездок в аэропорт или по городу. Uber доступен в более чем в 500 городах по всему миру — установите приложение и закажите первую поездку уже сегодня.
Заказать поездку с Uber легко. Вот как это работает:
— Просто откройте приложение и скажите нам, куда нужно ехать.
— Приложение определяет ваше местоположение, и водитель всегда знает, где вас встретить.
— Вы сможете увидеть фото вашего водителя и информацию об автомобиле, а также отслеживать его прибытие по карте.
— Оплатить поездку можно банковской картой, наличными в указанных городах, с помощью Android Pay, PayPal и других платежных систем.
Нужен простой способ быстро добраться из пункта А в пункт Б? Закажите uberX, наш самый доступный вариант для индивидуальных поездок.
Хотите экономить на поездках? Закажите uberPOOL — вы поедете с попутчиками и заплатите за поездку меньше.
Предпочитаете повышенный комфорт? Закажите автомобиль премиум-класса с UberBLACK. Мы предлагаем и другие варианты — путешествуете ли вы с большой группой или вам нужен автомобиль с дополнительными функциями для людей с ограниченными физическими возможностями.
Узнайте, доступен ли Uber в вашем городе, на https://www.uber.com/cities
Присоединяйтесь к нам в Twitter на https://twitter.com/uber
Нажимайте «Мне нравится» в Facebook на https://www.
Возникли вопросы? Посетите uber.com/help.
Примечание: Постоянное использование GPS в фоновом режиме может значительно сократить срок службы аккумулятора.
ВНИЗЛОАД Uber – лучше, чем такси MODБольше Карты и навигация Применение
GPS-навигатор, бесплатные карты мира, информация о движении, скорость радара
Лучшие карты для сохранения, обмена местоположениями
Navmii — crowd-powered GPS navigation with offline maps, traffic (Navfree)
Проложите маршрут движения с картой движения и дистанционным спидометром
Поездка, катание, велосипед или прогулка
Drive oil cargo truck and provide fuel to hill top fuel station in this 3D game
БЕСПЛАТНЫЙ радар-детектор. Радар-детектор No. 1 для вашего смартфона.
Радар-детектор No. 1 для вашего смартфона.
Избегайте сюрпризов с обновлениями пробок, полиции и другом. Получите их сейчас
Она состоит из трех типов карту, чтобы найти оптимальный маршрут.
Популярная офлайн GPS навигация с подробными картами 66 стран.
Бесплатная GPS навигация, транзитные и оффлайн карты! Найди свой путь Обновления
Найти направления движения с помощью GPS,карт, голосовой навигации и направлений
Ученые обнаружили у таксистов «мозговой» навигатор — РБК
Британские исследователи обнаружили доказательства того, что в мозге лондонских таксистов есть нечто вроде встроенной системы спутниковой навигации, передает Би-би-си.
Ученые следили за тем, как меняется активность головного мозга водителей во время испытания на виртуальном симуляторе. Оказалось, что разные участки мозга активизируются в зависимости о того, о чем размышляют таксисты, например, выбирают ли они маршрут, замечают знакомые ориентиры или думают о пассажирах.
Предыдущие исследования показали, что у таксистов по сравнению с представителями других профессий лучше развит гиппокамп. Эта часть головного мозга, как считается, участвует в организации ориентировочного рефлекса и внимания, регуляции вегетативных реакций и эмоций, управлении произвольными движениями, в механизмах памяти и обучения, в формировании сложных форм поведения.
«Нам хотелось идти дальше структуры головного мозга и посмотреть, какая в нем протекает активность, когда таксист делает свою работу», — сказал Хьюго Спайерс из Университетского колледжа Лондона.
Ученые провели магнитно-резонансное исследование, чтобы получить поминутные снимки головного мозга 20 добровольцев, которые должны были на виртуальном симуляторе доставить пассажира по определенному адресу. После сканирования испытуемым прокрутили запись и попросили пояснить, о чем они думали на том или ином этапе.
«Мы пытались выделить некоторую общность в мыслях водителей, когда они едут по городу, а потом привязать ее к конкретному времени и месту», — сказал Х.Спайерс.
5 лучших навигационных приложений для водителей Uber и Lyft (рейтинги и обзоры)
[activecampaign form = 5] Если вы водите райдшеринг, ваш GPS критически важен . Нет ничего хуже, чем иметь дело с неисправной навигацией и раздраженным пассажиром.
Наша команда взяла на себя смелость проанализировать лучшие приложения для GPS-навигации на рынке и проанализировать их в этом посте.
На что обращать внимание в приложениях Uber NavigationЕсли вы водите райдшеринг, вам нужно больше беспокоиться, чем просто выбрать лучший автомобиль для Uber.
Вот несколько вещей, которые следует учитывать при поиске лучшего приложения для GPS-вождения:
- Приложение перенаправит вас, если вы сделаете неверный поворот? Это особенно важно, если вы не знаете, в каком районе движетесь. Хорошие системы GPS обнаружат вашу ошибку как можно скорее и быстро найдут новый маршрут, по которому вы сможете вернуться на правильный путь.
- Хорошо ли приложение работает на городских дорогах или в загруженных местах? Некоторые приложения GPS просто не справляются с загруженностью в городской среде.Из-за помех от высоких зданий и навигации по близлежащим дорогам приложение может с трудом определить, где вы находитесь.

- Предлагает ли приложение несколько маршрутов, чтобы избежать задержек, закрытых дорог и т. Д.? Лучшее картографическое приложение для водителей райдшеринга — это приложение, которое даст вам возможность избегать определенных дорог, которые, как вы знаете, будут стоить вам денег или вызывать задержки.
- Предлагает ли приложение приблизительное время прибытия (ETA)? Ваши пассажиры могут захотеть узнать, сколько времени они могут ожидать от поездки, пока они не достигнут пункта назначения.Было бы полезно иметь приложение, которое дает вам точное ETA на основе текущего трафика, вашей скорости и других факторов.
- Предлагает ли приложение отчеты о пробках в реальном времени и другую полезную информацию? Говоря о дорожном движении, хорошее приложение для вождения с GPS должно предоставлять вам отчеты о дорожном движении в реальном времени и другую информацию о задержках, чтобы вы знали о любых помехах, с которыми вы можете столкнуться на своем диске.
А теперь давайте разберем 5 наших лучших выборов.
1.Uber NavUber имеет собственное навигационное приложение, известное как Uber Nav, встроенное прямо в приложение для водителя. Uber понимает, насколько важна навигация для водителей поездок, поэтому он стремится упростить этот процесс с помощью встроенного приложения GPS. Uber Nav совместим с любым интеллектуальным устройством, на котором можно запустить приложение Uber.
ПлюсыUber Nav извлекает данные GPS из нескольких систем, таких как Google Maps, Bing Maps и TomTom, для более комплексной навигации.Это означает меньшую вероятность сбоев в работе навигационной системы даже при движении по городу. Кроме того, для водителей Uber у вас будет быстрый доступ к навигации без необходимости переключаться между приложениями, поскольку она уже встроена в приложение Uber, которое вы будете использовать.
Минусы В прошлом у приложения были проблемы с функциональностью, особенно при навигации по перегруженным районам. Тем не менее, он постоянно совершенствуется за счет партнерства с другими навигационными системами, чтобы стать более точным в любой ситуации.
Тем не менее, он постоянно совершенствуется за счет партнерства с другими навигационными системами, чтобы стать более точным в любой ситуации.
Те, кто уже пользуется услугами Uber, и которым нужен простой способ использования навигации из приложения Uber.
2. Карты GoogleGoogle Maps, пожалуй, самое известное навигационное приложение, продолжает оставаться на вершине рейтинга. Приложение входит в стандартную комплектацию новых устройств Android, но также доступно бесплатно для iOS.
Плюсы Карты Google переключаются между дневным и ночным просмотром карты для наилучшего возможного освещения в любой ситуации.Он также имеет полезные преимущества, такие как интеллектуальное изменение маршрута, если вы сбились с курса, отчеты о дорожном движении в реальном времени, голосовой поиск местоположения и несколько маршрутов, позволяющих избежать пробок и других задержек. У вас также будет сверхточное расчетное время прибытия, основанное на вашей скорости, текущем трафике и других соображениях.
У вас также будет сверхточное расчетное время прибытия, основанное на вашей скорости, текущем трафике и других соображениях.
Карты Google имеют неудобное произношение для обозначения дорог и городов, но голосовые подсказки определенно компенсируют странные слова.
Для кого это лучше всего?Водители Rideshare, которые хотят пользоваться навигацией без помощи рук. Благодаря голосовому поиску адресов и пошаговым указаниям с голосовыми подсказками вам редко придется прикасаться к телефону, чтобы получить обновленные маршруты из Карт Google.
3. WazeGoogle приобрел Waze в 2013 году за 1,15 миллиарда долларов , так что он должен был знать, что приложение готово к успеху.Доступный для устройств iOS и Android, Waze быстро становится одним из самых популярных приложений для навигации.
Плюсы Waze — это GPS-приложение для сообщества. Это означает, что оно получает информацию от других водителей в вашем районе, чтобы вы могли получать самую свежую информацию о том, где вы едете. Другие могут сообщить вам о дорожном движении, авариях, дорожных работах, ценах на бензин и обо всем, что может повлиять на вашу поездку на работу. Другие могут даже помочь повысить точность Waze, обновив его карты, когда увидят необходимое исправление.
Это означает, что оно получает информацию от других водителей в вашем районе, чтобы вы могли получать самую свежую информацию о том, где вы едете. Другие могут сообщить вам о дорожном движении, авариях, дорожных работах, ценах на бензин и обо всем, что может повлиять на вашу поездку на работу. Другие могут даже помочь повысить точность Waze, обновив его карты, когда увидят необходимое исправление.
Waze не поддерживает систему помощи при движении по полосе, из-за которой сложно определить, по какой полосе вам нужно двигаться по шоссе. Пользователи также говорят, что дороги и полосы в приложении могут быть плохо видны, а иногда функция масштабирования работает не так точно, как следовало бы.
Для кого это лучше всего? Waze, пожалуй, одно из самых удобных навигационных приложений для водителей райдшерингов.Водители Uber могут воспользоваться информацией, которую предоставляют другие водители в этом районе. Поскольку пользователи могут обновлять карты, на которых сложно ориентироваться, вождение по городу может быть более точным при использовании Waze.
Поскольку пользователи могут обновлять карты, на которых сложно ориентироваться, вождение по городу может быть более точным при использовании Waze.
Sygic доступен для устройств Android, iOS и Windows и работает через встроенную в ваш автомобиль систему. Вы можете попробовать его в течение 7 дней бесплатно, но после этого вам нужно будет приобрести премиум-лицензию, чтобы продолжить его использование.
ПлюсыSygic дает вам возможность доступа к картам даже в автономном режиме, что особенно полезно, если у вас закончились данные или вы находитесь вне зоны доступа Wi-Fi. Вы не всегда можете полагаться на работу сотового телефона, особенно если вы путешествуете в более удаленной от сети районе, поэтому водителям Uber стоит рассмотреть возможность использования этой функции.
МинусыАвтономный режим карты может работать несколько медленно.Вам также придется добавить информацию об адресе вручную, так как автоматически заполненные адреса не будут работать без доступа в Интернет. Цены могут достигать 125 долларов, но это всего лишь единовременная плата, которая включает в себя обновления карты на всю жизнь.
Для кого это лучше всего?Водители Uber, которые часто выезжают за пределы обычных зон обслуживания сотовых телефонов или просто хотят большего спокойствия, зная, что они могут при необходимости открывать карты в автономном режиме.
5.НавмийNavmii — бесплатное приложение GPS для устройств Android и iOS с возможностью приобретения версии без рекламы. Приложение имеет минималистичный интерфейс, который упрощает использование и понимание.
ПлюсыNavmii предлагает некоторые забавные элементы, такие как возможность соревноваться с другими, чтобы попасть в таблицу лидеров для лучших водителей . Приложение будет учитывать вашу безопасность вождения и привычки, такие как скорость и продолжительность поездок, и будет вознаграждать вас баллами, чтобы вы могли видеть, как вы складываете свои позиции по сравнению с другими водителями.
Кроме того, приложение предлагает бесплатные данные о трафике в реальном времени, так что вы можете быть в курсе любых возможных зависаний на вашем маршруте. Navmii уведомит вас об авариях, закрытых дорогах или других задержках, чтобы вы могли найти альтернативные маршруты, если это возможно.
МинусыНеобходимо загрузить отдельные карты, для чего требуются данные или соединение Wi-Fi. Кроме того, качество изображения в приложении не самое лучшее. На самом деле, это немного похоже на мультфильм.
Для кого это лучше всего?Это приложение лучше всего подходит для водителей Uber, которые хотят немного подработать для своих пассажиров. Navmii предлагает более 17 миллионов новых достопримечательностей, которые помогут вам найти особые места на вашем маршруте. Итак, если вы хотите по-настоящему угодить пассажирам, вы можете найти места, когда ваши пассажиры их попросят, например, крутые местные закусочные, музеи или отели.
Лучшее = Google MapsХотя каждая из этих карт предлагает определенные преимущества для водителей Uber, Google Maps, кажется, преобладает с точки зрения безопасности и функциональности.Благодаря возможности использовать его во время вождения без помощи рук, вам не придется отрывать глаза от дороги, чтобы узнать, куда вам нужно ехать дальше. Кроме того, данные о дорожном движении в режиме реального времени, точное время прибытия, изменение маршрута и помощь в выборе полосы движения делают это приложение лучшим помощником в навигации для водителей райдшерингов.
Мы что-то пропустили? Какое у вас приложение?
Девять лучших приложений для водителей такси
От Google Maps до Drivermatics, мы рассмотрим некоторые из лучших и наиболее полезных приложений для мобильных устройств и смартфонов, которые улучшат ваш бизнес в сфере такси, как в частном найме, так и в такси.
Сейчас практически невозможно вспомнить дни до появления мобильных телекоммуникаций, особенно в сфере такси. В роли наемного кэба вас либо остановили на обочине дороги, либо указали направление по трескучей двусторонней рации из частного пункта управления прокатом.
В настоящее время на рынке смартфонов доминируют приложения, и почему следует исключить автомобильную промышленность? Если вы работаете в частном или государственном бизнесе по аренде такси, вам нужно опережать свою игру (и конкуренцию), особенно в трудных условиях.
Как специалисты по страхованию частных такси и государственных компаний по страхованию такси, мы стремимся сделать жизнь наших клиентов максимально спокойной. Вот наш путеводитель по некоторым недавним приложениям, которые сделают вашу жизнь немного проще.
Это бесплатное приложение является самым популярным среди водителей такси. Он доставит вас именно туда, куда вы хотите, по самым быстрым, понятным маршрутам и новейшим доступным картам. Голосовое управление означает, что вы больше никогда не ошибетесь, а счетчик расстояния — полезное руководство для тех, кто рассчитывает цену за милю / км.Кому нужны Знания в Лондоне, когда они у вас есть?
Еще одно приложение, оказавшее большое влияние в мире автомобильной навигации, — это Waze. Он дает вам информацию в режиме реального времени об условиях дорожного движения, камерах контроля скорости и авариях. Ваши друзья-участники дорожного движения могут добавлять отчеты о возможной пробке или задержке, чтобы вы могли соответствующим образом спланировать или изменить свой маршрут.
Избегайте этих надоедливых штрафных очков, защитите свой бизнес и наслаждайтесь более безопасным вождением с помощью единственного приложения, которое сочетает в себе предупреждения о дорожном движении в реальном времени и обнаружение камеры контроля скорости, позволяя вам оставаться уверенными и в курсе дорога.
Этот вариант идеально подходит для владельцев такси, которые постоянно ищут лучшие цены на топливо. Удобное приложение PetrolPrices позволяет узнать, где поблизости от вас находятся самые дешевые бензозаправочные станции. Водители электромобилей, возможно, захотят рассмотреть PlugShare (IOS и Android), который показывает ближайшие станции зарядки для электромобилей.
Поиск места для парковки может нервировать, особенно если вы едете в незнакомой местности.JustPark позволяет легко находить и резервировать парковочные места, позволяет платить за место в приложении и включает в себя множество опций, таких как муниципальные и частные автостоянки и частные подъездные пути. И полезный совет для таксистов, работающих из дома: пока вы не зарабатываете, вы даже можете указать свое собственное место для парковки дома в приложении — и взимать плату с пользователя тоже!
Конец вашей смены, и вы устали и голодны в чужом городе.Но вам также нужно найти ближайший банкомат? AroundMe идеально подходит для тех случаев, когда вы едете в незнакомом районе, потому что он позволяет вам точно определять местонахождение ближайших банкоматов, ресторанов, заправочных станций и т. Д. — будь то для ваших пассажиров или для себя. Вы даже можете забронировать отель через приложение, если вас ждет неожиданная ночевка.
Это приложение абсолютно необходимо для независимого владельца такси, который использует свой автомобиль в социальных и деловых целях.Если вы накапливаете много миль для бизнеса и из-за стресса отслеживаете все пройденные поездки и израсходованное топливо, вам может потребоваться дополнительная поддержка. MileIQ использует GPS и часы вашего телефона для регулярного отслеживания каждой поездки, включая время начала и остановки, а также общее количество пройденных миль. Вы даже можете определить тариф за милю и экспортировать свои служебные или социальные мили в электронную таблицу.
Если вы регулярно путешествуете по аэропортам, то это удобное приложение идеально вам подойдет.Вы можете отслеживать любой рейс в страну, так что вы можете быть готовы и ждать, чтобы забрать своих пассажиров. Flightradar24 отображает на карте информацию об отслеживании рейсов коммерческих самолетов в режиме реального времени. Он включает в себя всю информацию о рейсах, пунктах отправления и назначения, номера рейсов, типы самолетов, местоположения, высоту и скорость.
Если у вас нет видеорегистратора, это приложение станет лучшим выбором. Приложение Drivermatics с красивым дисплеем, простым в использовании интерфейсом и точными данными о вождении предлагает определение расстояния, скорости и GPS-позиционирования, а также отслеживает ваше вождение и помещает вас в таблицу рейтинга с другими автомобилистами.Сбор данных — но не видео — выполняется в фоновом режиме, а навигация встроена, с возможностью выбора приложений Google, Waze и Apple. Кнопка SOS может подключаться к аварийным или аварийным службам. Получил пять звезд от Auto Express.
У лучших навигаторов гиппокамп больше?
Abstract
Работа с нечеловеческими животными и экспертами по навигации (лондонские таксисты) предполагает, что размер гиппокампа, особенно правого заднего гиппокампа у людей, имеет отношение к знаниям в области навигации.Подобные наблюдения, иногда затрагивающие и другие участки гиппокампа, были сделаны для стареющего населения и для людей с нейродегенеративными заболеваниями, которые влияют на гиппокамп. Эти данные подтверждают гипотезу о том, что объем гиппокампа связан с навигационной способностью. Однако поддержка этой гипотезы неоднозначна среди здоровых молодых людей, которые широко различаются по своим навигационным способностям. Здесь мы выполнили задачу естественной навигации, которая измеряет точность когнитивных карт для выборки из 90 здоровых молодых людей, которым также делали МРТ.Используя план последовательного анализа с зарегистрированным планом анализа, мы не обнаружили, что навигационная способность связана с объемом гиппокампа (общий, только правый, только правый задний). Мы пришли к выводу, что способность к навигации в типичной популяции не коррелирует с вариациями в размере гиппокампа, и рассмотрим возможные объяснения этого нулевого результата.
Ключевые слова: гиппокамп, человеческое поведение, пространственное познание, пространственная навигация, структурная МРТ
1. Введение
Пространственная навигация — фундаментальная проблема, с которой сталкивается любой мобильный организм.Эта способность частично поддерживается гиппокампом, который теоретически строит когнитивную карту — знание расстояний и направлений между ориентирами (O’Keefe & Nadel, 1978; Tolman, 1948). Доказательства роли гиппокампа в навигации получены из функциональных нейронных данных на широком диапазоне уровней анализа. На уровне одной клетки поместите клетки в огонь гиппокампа, когда животное находится в определенном месте (Ekstrom et al., 2003; O’Keefe & Nadel, 1978). На уровне вокселей фМРТ показывает, что образцы вокселей в гиппокампе соответствуют информации о пространственном расстоянии (Vass & Epstein, 2013).На всем анатомическом уровне гиппокампа фМРТ показывает, что гиппокамп более активен во время активной навигации, чем при пассивном путешествии или при следовании знакомому маршруту (например, Hartley et al. 2003). Итак, нейронная активность в гиппокампе согласуется с гипотезой о том, что гиппокамп строит когнитивную карту.
Как ни странно, есть основания предполагать, что вариации в структуре и функциях гиппокампа могут быть связаны с вариациями в навигационных способностях. Магуайр и его коллеги (2000; 2006) показали, что правый задний гиппокамп был увеличен у водителей такси из Лондона, которые запоминают огромный каталог пространственной информации и легко перемещаются по сложной структуре Лондона.Дальнейшая работа показала, что у пожилых таксистов, которые все еще водили такси, увеличился правый задний гиппокамп по сравнению с пожилыми таксистами, которые остановились (Woollett, Spiers, & Maguire, 2009). Хотя эта работа с водителями такси была представлена в числе первых данных, демонстрирующих корреляцию между объемом гиппокампа и аспектами навигационного поведения, размеры выборки были небольшими (менее 20 участников в большинстве исследований). И, несмотря на заявления об увеличении объема правого заднего гиппокампа и уменьшении объема правого переднего гиппокампа у водителей такси, исследователи не тестировали ключевое взаимодействие между задним и передним объемом гиппокампа между водителями такси и контрольной группой, что делает этот вывод неподтвержденным данными.Тем не менее, дополнительные исследования на животных, кроме человека, подтвердили идею о том, что более крупные гиппокампы связаны с лучшей навигацией (Sherry, Jacobs, & Gaulin, 1992). Важно отметить, что изменения размера гиппокампа могут происходить в течение жизни животного. У самцов луговых полевок, например, наблюдается пролиферация клеток в зубчатой извилине, сопровождающаяся увеличением объема гиппокампа в сезон размножения (когда у самцов более высокие требования к пространственной навигации) по сравнению с сезоном отсутствия размножения (Galea & McEwen, 1999).Точно так же нарушение работы гиппокампа связано с дефицитом пространственной навигации. Плохая пространственная навигация наблюдается у пациентов с болезнью Альцгеймера (Deipolyi, Rankin, Mucke, Miller, & Gorno-Tempini, 2007; Konishi et al., 2018; Moodley et al., 2015; Plancher, Tirard, Gyselinck, Nicolas, & Piolino, 2012), пациентов с поражениями головного мозга (Kolarik, Baer, Shahlaie, Yonelinas, & Ekstrom, 2018; Rosenbaum et al., 2000; Smith & Milner, 1981) и пожилых людей (Konishi, Mckenzie, Etcharnendy, Roy, & Bohbot, 2017; Мудли и др., 2015). Эти группы показывают уменьшенный объем гиппокампа, предполагая, что здоровый гиппокамп имеет решающее значение для нормальной функции пространственной навигации.
В совокупности эта литература, кажется, представляет собой убедительные аргументы в пользу связи между объемом гиппокампа и навигацией. Однако данные, полученные от здоровых молодых людей, более неоднозначны. Некоторые исследования положительны. Во-первых, есть данные о том, что объем гиппокампа коррелирует с конкретными пространственными задачами, имеющими отношение к навигации, особенно с перспективой.(в котором необходимо представить себе невидимый вид). Восприятие перспективы коррелирует с пространственной памятью для крупномасштабных сред (Weisberg & Newcombe, 2016) и вызывает активацию нейронов в гиппокампе (Lambrey, Doeller, Berthoz, & Burgess, 2012). Хартли и Харлоу (2012) создали задачу на перспективу, в которой участники сопоставляют изображение трехмерных гор с изображением того же горного хребта, рассматриваемого с другой точки зрения, игнорируя похожие на вид фольги. Точность этого задания коррелировала с двусторонним объемом гиппокампа.Шерилл и его коллеги (2018) измерили способность участников найти цель от первого лица и с точки зрения карты после просмотра карты с указанием их местоположения и положения цели. Точность при виде от первого лица коррелировала с двусторонним объемом заднего гиппокампа. Во-вторых, объем гиппокампа коррелирует со специфическими стратегиями, используемыми здоровыми молодыми людьми при навигации. Бохбот и его коллеги измерили стратегию пространственной навигации, используя задачу, в которой направление к целям могло быть основано на том, какой ответ должен быть сделан (например,г., справа; Считается, что полагается на хвостатое ядро), или на основе положения каждой цели относительно внешних ориентиров (например, церковь находится справа от школы; считается, что полагается на гиппокамп), независимо от успеха в достижении цели. Они обнаружили значительную положительную корреляцию с объемом гиппокампа и количеством целей по отношению к внешним ориентирам (Bohbot, Lerch, Thorndycraft, Iaria, & Zijdenbos, 2007). В-третьих, с использованием самооценки способности к навигации, два исследования с большими выборками сообщили о корреляции с объемом гиппокампа, хотя размеры эффекта были скромными (Hao et al., 2016; Wegman et al., 2014).
Однако ни один из этих подходов не является прямым. Взгляд на перспективу — это только одна составляющая успешной навигации. Стратегия навигации может быть ортогональна точности навигации (Marchette, Bakker, & Shelton, 2011). Самоотчет коррелирует с точностью навигации, но не так. При более непосредственном взгляде на проблему у типичных взрослых, использующих реальную среду для измерения навигационных способностей, обнаружена большая корреляция с правым задним гиппокампом.Однако это исследование страдает из-за использования небольшой выборки (Schinazi, Nardi, Newcombe, Shipley, & Epstein, 2013), и нам неизвестны другие исследования такого рода. Кроме того, исследования в этой литературе различаются по тому, как они определяют соответствующие области гиппокампа, анализируя объем правого заднего гиппокампа (Maguire et al., 2000, 2006; Schinazi et al., 2013), общий объем гиппокампа (Hao et al., 2016; Hartley & Harlow, 2012; Konishi et al., 2017; Wegman et al., 2014) или оба задних гиппокампа (Sherrill et al., 2018). Более того, некоторые исследования корректируют общий объем мозга, пол и возраст, а другие — нет. Эти различные анатомические и аналитические решения подрывают уверенность в предположении, что структура гиппокампа коррелирует с навигацией.
Здесь мы проверяем гипотезу о том, что объем гиппокампа является биологическим маркером способности пространственной навигации у молодых, здоровых людей. Мы проверяем эту гипотезу на большой выборке, используя широко используемую виртуальную среду рабочего стола (Virtual Silcton; Weisberg et al.2014; Weisberg and Newcombe 2016). Virtual Silcton измеряет точность навигации, позволяя участникам выбирать стратегию, которую они используют. В качестве первичной поведенческой меры, представляющей интерес, мы выбрали общую производительность наведения — или то, насколько точно участники могут указывать на все точки и из них в Virtual Silcton. Этот показатель отражает точность, с которой участники узнавали направление от каждого здания к другому, и может заменить способность выбрать новый ярлык — отличительный признак когнитивной карты.В отличие от задачи, использованной Бохботом и его коллегами (2007), задача наведения, используемая в Virtual Silcton, не ограничивает участников использовать ту или иную стратегию навигации.
Мы выбрали общий объем правого гиппокампа в качестве основной цели анализа, потому что объем правого гиппокампа, как сообщается, более последовательно связан с навигационной способностью, чем левый. Таким образом, мы выбрали правильный объем гиппокампа в качестве нашего первичного подтверждающего анализа, простейшего измерения объема гиппокампа, который не внесет дополнительных проблем в надежность сегментации или выбора метода измерения.Мы зарегистрировали один подтверждающий анализ с использованием последовательного анализа (Lakens, 2014), в котором мы планировали соотнести правый общий объем гиппокампа с тем, насколько хорошо участники узнали местоположения после навигации в Virtual Silcton. Однако, в то время как некоторые данные предполагают, что задний гиппокамп справа наиболее сильно связан со способностью пространственной навигации (Maguire et al., 2000; Schinazi et al., 2013), другие исследования показывают эту связь с правым передним гиппокампом (Wegman et al. ., 2014) или правого общего гиппокампа (Hao et al., 2016; Hartley & Harlow, 2012; Konishi et al., 2017). В некоторых исследованиях в качестве основной представляющей интерес меры оценивается соотношение между передним и задним гиппокампом (Poppenk, Evensmoen, Moscovitch, & Nadel, 2013). По этой причине в исследовательских анализах мы также смотрели на передний, задний и общий объем гиппокампа справа и слева.
Мы также рассмотрели возможность того, что структуры мозга, не относящиеся к гиппокампу, могут иметь отношение к способности к навигации, или что альтернативные меры способности к навигации могут лучше улавливать навигацию, основанную на гиппокампе.Таким образом, мы провели исследовательский анализ, касающийся точности нескольких показателей Virtual Silcton (подмножества задач наведения, карта, построенная на основе памяти и именование зданий) и показателей, не относящихся к Silcton (включая умственное вращение, вербальные способности, способность самооценки к навигации и самооценку). -сообщенное пространственное беспокойство) к объему различных структур мозга (включая подразделения левого и правого гиппокампа, хвостатое ядро, миндалевидное тело и общий объем коры).
2. Материалы и методы
2.1. Участники
Мы набрали участников путем рекламы и набора из участников, которые участвовали в экспериментах фМРТ Центра когнитивной нейробиологии Университета Пенсильвании, попросив их принять участие в часовом исследовании, за которое им заплатили бы 10 долларов. .
Мы набрали 90 участников (54 женщины). Девятнадцать участников заявили о себе как о азиатах, 17 — о афроамериканцах или чернокожих и 42 — о белых или белых. Тринадцать участников сообщили о себе как латиноамериканцы, трое сообщили о нескольких расах, один сообщил о другом, а один участник не сообщил об этнической принадлежности или расе.Средний возраст участников составлял 23,1 года ( SD, = 3,94).
2.2. MRI Acquisition
Сканирование проводилось в больнице Пенсильванского университета с использованием сканера 3T Siemens Trio, оснащенного 64-канальной головной катушкой. Т1-взвешенные изображения с высоким разрешением были получены с использованием подготовленной трехмерной намагниченностью последовательности импульсов градиентного эхо-сигнала для быстрого получения. Поскольку эти данные были собраны для различных исследований, конкретные параметры варьировались в зависимости от протокола (см. Дополнительную таблицу 1).
2.3. Объемные меры
Мы рассчитали нейроанатомический объем корковых структур двумя способами. Для основного анализа правого гиппокампа мы извлекали объем гиппокампа двумя способами — Freesurfer и автоматической сегментацией подполей гиппокампа (ASHS). Для исследовательского анализа, включая субрегионы гиппокампа и дополнительные нейроанатомические структуры, мы сосредотачиваемся на расщеплении ASHS в основном тексте, но включаем анализ Freesurfer в дополнительные результаты.
Мы использовали программное обеспечение Freesurfer 6.0 (Иглесиас и др., 2015) для получения оценок объема корковых и подкорковых областей в рамках стандартного конвейера повторного обследования. Мы сегментировали задний и передний гиппокамп вручную, используя парцелляцию гиппокампа Freesurfer. Передний гиппокамп был определен как все вокселы в этой парцелляции, которые были во всех срезах перед (и включая) последний корональный срез с по крайней мере 3 пикселями, которые можно было идентифицировать как ункус (как определено в Morey et al.2009 г.). Затем мы вручную сегментировали задний и передний гиппокамп, используя парцелляцию гиппокампа Freesurfer. Передний гиппокамп определялся как все вокселы в этой парцелляции, которые были во всех срезах перед (и включая) последний корональный срез с по крайней мере 3 пикселями, которые могли быть идентифицированы как uncus (как определено в Morey et al. 2009). Мы также использовали конвейер ASHS, который выполняет автоматическое разделение гиппокампа и других структур медиальной височной доли, включая оценку заднего и переднего гиппокампа (Юшкевич и др., 2015).
2.4. Поведенческие меры и самооценка
2.4.1. Демография.
Мы попросили участников указать свой биологический пол, пол, этническую принадлежность, возраст, уровень образования и руки.
2.4.2. Тест 4 достижений широкого диапазона — вербальный (WRAT-4; Wilkinson and Robertson 2006).
Субтест чтения слов WRAT-4 — это мера вербального IQ, который сильно коррелирует с WAIS-III и WISC-IV (Strauss, 2006). Субтест по чтению слов WRAT-4 требует от участников произнести пятьдесят пять отдельных слов.Оценка каждого участника — это количество правильно произнесенных слов из 55. Все участники, которые сообщили, что говорят на любом языке, кроме английского, в качестве своего первого языка, были исключены из этого анализа (восемь участников были исключены на основании этого критерия).
2.4.3. Опросник пространственной тревожности (SAQ; Lawton 1994).
Этот самоотчет для измерения пространственной тревожности состоит из восьми пунктов по 7-балльной шкале Лайкерта, которые просят участников указать свой уровень тревожности при столкновении с такими ситуациями, как «Размещение вашего автомобиля на очень большом гараже или на стоянке» и «Найти дорогу на прием в незнакомом районе города или поселка.”
2.4.4. Шкала чувства направления Санта-Барбары (SBSOD; Hegarty, Richardson, Montello, Lovelace, & Subbiah, 2002).
Этот самоотчетный показатель навигационных способностей состоит из пятнадцати пунктов 7-балльной шкалы Лайкерта, таких как «Я очень хорошо умею давать указания» и «Я очень легко заблудился в новом городе». Было показано, что средний балл каждого участника сильно коррелирует с эффективностью выполнения задач поведенческой навигации в реальных и виртуальных средах (Hegarty et al., 2002; Weisberg et al., 2014).
2.4.5. Тест умственного вращения (MRT; Vandenberg and Kuse 1978; адаптировано Peters et al. 1995; доступно на веб-сайте Virtual Silcton: www.virtualsilcton.com или https://www.sil.northwestern.edu/resources2).
Эта компьютеризированная версия MRT состоит из двух разделов по 10 пунктов с несколькими вариантами ответов. У участников есть три минуты на каждый раздел. Каждый элемент состоит из одного целевого двухмерного изображения трехмерной фигуры, составленной из соединенных кубиков, и четырех вариантов ответа, также составленных из соединенных кубиков.Два варианта ответа — это та же конфигурация кубов, но повернутых в трехмерном пространстве. Два других варианта ответа представляют собой другую конфигурацию. Участники получали два балла за правильный выбор и теряли два балла за неправильный выбор. За каждое упущение начислялось ноль баллов.
2.4.6. Virtual Silcton (Schinazi et al., 2013; Weisberg & Newcombe, 2016; Weisberg et al., 2014; доступно на веб-сайте Virtual Silcton: www.virtualsilcton.com или https://www.sil.northwestern.edu/resources2) .
Virtual Silcton — это парадигма поведенческой навигации, управляемая с помощью настольного компьютера, мыши и клавиатуры. Смоделированные на основе парадигмы интеграции маршрутов (например, Hanley and Levine 1983; Holding and Holding 1989; Ishikawa and Montello 2006; Schinazi et al. 2013), участники изучают два маршрута в разных областях одной виртуальной среды, виртуально путешествуя по указанной дороге. стрелками (см.). Они узнают названия и расположение четырех зданий на каждом из этих маршрутов. Затем они путешествуют по двум маршрутам, которые соединяют две области из первых двух маршрутов.Виртуальное путешествие состояло из нажатия клавиш со стрелками (или клавиш W, A, S и D) на стандартной клавиатуре для перемещения по окружающей среде и перемещения мыши для осмотра. Участники были вынуждены путешествовать только по маршрутам, указанным стрелками. То есть мы окружили каждый маршрут невидимыми стенами, которые ограничивали движение с маршрутов, но были видны сквозь них. Участники могли двигаться и смотреть в любом темпе по своему выбору. У участников была возможность изучить каждый маршрут один раз. Как минимум, мы требовали, чтобы участники прошли от начала до конца и обратно к началу каждого маршрута, но участники могли тратить столько времени и возвращаться назад, сколько им заблагорассудится.Здания были обозначены синими драгоценными камнями, которые парили над дорожкой, и названы знаками перед зданием.
Скриншоты и карта Virtual Silcton.Скриншоты с маршрутов A и B (A) и аэрофотоснимок Virtual Silcton, которые участники никогда не видели (B). Здания были обозначены синими драгоценными камнями, которые парили вдоль пути и названы желтыми и красными знаками. Маленькие белые кружки на карте обозначают входную дверь каждого здания, это именно то место, на которое участников просили указывать во время задания на указание.
Участники были проверены на то, насколько хорошо они запомнили направления между зданиями на каждом из основных маршрутов и между зданиями между основными маршрутами. Тестирование включало две задачи. Для выполнения задания по наведению на место участники указывали на все здания из каждого изученного здания. Участник просматривал виртуальную среду вдоль маршрута, рядом с одним из зданий, которые они изучили, и перемещал мышь, чтобы повернуть вид и установить перекрестие на одно из других зданий, затем щелкнул, чтобы записать направление.Затем название здания в верхней части экрана изменилось, и участник указал на следующее названное здание. Зависимая переменная была рассчитана как абсолютная ошибка между оценкой участника и фактическим направлением здания (если эта разница превышала 180 °, она корректировалась для измерения более короткой из двух возможных дуг). Мы рассчитали ошибку наведения отдельно для испытаний в пределах маршрута и испытаний между маршрутами отдельно. В результате было проведено 32 межмаршрутных испытания и 24 внутримаршрутных испытания.Из 24 испытаний в пределах маршрута 14 были взаимно взаимозаменяемыми (т. Е. Если какая-либо часть здания, на которую указывали, была видна из здания, из которого указывается, это засчитывается как взаимно-невидимые испытания), а 10 — нет.
Участники также выполнили задание по построению моделей, в ходе которого они просмотрели прямоугольную рамку на экране компьютера и изображения восьми зданий с высоты птичьего полета. Прокручивая здания мышью, вы видите изображение фасада здания и его название.Участников проинструктировали перетащить здания в положение в поле, которое, по их мнению, будет расположено (как если бы они создавали карту), независимо от ориентации зданий или карты. Задача построения модели оценивалась с использованием двумерного регрессионного анализа (Friedman and Kohler, 2003).
Наконец, в задании по названию здания участникам показали фотографии каждого здания и попросили назвать здание в меру своих возможностей.
2.4.7. Анкета для подведения итогов и стратегии.
Мы задали участникам два вопроса для подведения итогов: «Какая часть навигационного теста была самой сложной?» и «Были ли у вас проблемы с запоминанием названий зданий, а также позиций? Опишите стратегии, которые вы использовали, чтобы запомнить названия и расположение зданий ».
2,5. Процедура эксперимента
Участники завершили МРТ-сканирование в рамках отдельного эксперимента либо в нашей лаборатории, либо в другой лаборатории Университета Пенсильвании.Затем участники были набраны для участия в поведенческом исследовании в отдельном сеансе. В поведенческом сеансе участники сначала предоставили и задокументировали информированное согласие, затем заполнили демографические данные и измерения WRAT-4, а затем SAQ, SBSOD и MRT. Затем участники заполнили Virtual Silcton и анкету для подведения итогов.
2,6. План регистрации и анализа
Это исследование было зарегистрировано в Open Science Framework (OSF; https://osf.io/ea99d/) после завершения сбора данных для 50 участников и анализа данных для 33 участников.План анализа был создан, как описано в регистрационных документах, чтобы формально установить A) один из множества возможных способов анализа данных для решения нашей гипотезы и B) процедуру последовательного сбора данных анализа.
Мы основали наш план анализа на простейшей возможной корреляции между общим структурным объемом правого гиппокампа (Fischl et al., 2002) с общей производительностью наведения на Virtual Silcton. Этот анализ был выбран потому, что он требует наименьшей человеческой субъективности при кодировании данных и, основываясь на эмпирической литературе, что правильный гиппокамп, скорее всего, будет иметь отношение к навигации.
Мы предложили план последовательного анализа, потому что результаты 33 участников были неоднозначными (незначительная корреляция, но с небольшим размером выборки). Учитывая сложность набора участников с данными МРТ, последовательный анализ позволяет гибко определять размер выборки. Мы использовали имеющуюся литературу для создания больших и малых пороговых значений для значений p , после которых сбор данных прекращался, а результаты представлялись в отчете. Большое пороговое значение p было основано на величине эффекта между самооценкой навигационной способности и объемом гиппокампа, о котором Хао и его коллеги (2016) заявили как наименьший интересующий нас размер эффекта.Небольшое отсечение значения p было основано на использовании q <0,05 ( p <0,05 после применения поправки последовательного анализа для множественных сравнений; Lakens 2014). Мы использовали мощность = 80% и собирали партии из 20 участников, пока мы не получили значение p , которое было меньше q <0,05, или пока мы не достигли общего количества участников 90 (в этот момент у нас будет 80% шанс обнаружения эффекта, значительно превышающего наш наименьший интересующий размер эффекта).
Промежуточные результаты, представленные при регистрации на OSF, использовали наш план анализа, чтобы определить, нужно ли будет привлекать дополнительных участников. С момента первоначальной регистрации мы узнали о конвейере, который дает более точные расчленения объема гиппокампа (что мы проверили с помощью визуального исследования сегментов гиппокампа), а также обеспечивает автоматические оценки заднего и переднего объема (исследовательский вопрос, представляющий интерес). Следовательно, мы использовали этот новый метод анатомического анализа, который не был предварительно зарегистрирован.
2.7. Статистические инструменты
Все обработанные данные и код доступны в Open Science Framework (https://osf.io/ea99d/). Все рисунки, анализы и дополнительные анализы доступны в интерактивном блокноте Jupyter (https://mybinder.org/v2/gh/smweis/Silcton_MRI/master).
Если ниже не указано иное, статистика рассчитывалась с использованием пакетов scipy и numpy в Python (McKinney, 2010; Oliphant, 2006). Данные обрабатывались с помощью Pandas (McKinney, 2010) и визуализировались с помощью Matplotlib (Hunter, 2007).ANOVA с повторными измерениями рассчитывались с использованием пакета ezANOVA в R (версия 4.4) с использованием RStudio (RStudio Team 2016). Величины эффекта для тестов t- , d Коэна с поправкой на корреляции для внутривыборочных тестов, а для ANOVA — обобщенные квадраты эта (η 2 г ; Bakeman 2005).
3. Результаты
Сначала мы представляем результаты предварительно зарегистрированных анализов. Далее мы описываем несколько множественных регрессионных анализов, которые мы выполнили для сопоставления с предыдущими анализами (например,g., контролируя объем коры, возраст и пол). Затем мы представляем исследовательский анализ, используя следующую последовательность. Сначала мы сосредотачиваемся на измерениях Virtual Silcton, более широко рассматривая подразделения гиппокампа (правый и левый), прежде чем перейти к другим подкорковым областям и кортикальному объему. Наконец, мы анализируем показатели, не относящиеся к Silcton, следуя той же прогрессии от гиппокампа к остальной части мозга.
3.1. Предварительно зарегистрированные анализы
Нашим основным анализом была корреляция между объемом правого гиппокампа и общей ошибкой наведения на Virtual Silcton.Мы не обнаружили корреляции между объемом правого гиппокампа и ошибкой наведения, r (90) = 0,02, p = 0,88. Преобразование этого значения в статистику t дает байесовский фактор (BF; рассчитывается из http://pcl.missouri.edu/bf-one-sample; Rouder et al. 2009) в пользу нулевой гипотезы (BF ). 01 ) из БФ 01 = 8,49. Использование оригинального указанного плана анализа (автоматический расчет объема гиппокампа Freesurfer) для извлечения объема гиппокампа не изменило эти результаты, r (90) =.07, p = 0,52, BF 01 = 7,04.
Хотя мы не указали, будут ли исключены выбросы при предварительной регистрации, мы повторно провели этот анализ, исключив одного выброса, у которого общий объем правого гиппокампа был примерно на 4 стандартных отклонения ниже среднего. Пропуск этого человека привел к немного более высокой, но все еще незначительной корреляции: r (88) = 0,10, p = 0,38 и BF 01 = 5,49 (см.). Использование оригинального указанного плана анализа для извлечения объема гиппокампа также не изменило эти результаты, r (88) =.12, p = 0,28, BF 01 = 4,80.
Связь между общей производительностью наведения и объемом правого гиппокампа.Общая корреляция (черная линия, черный шрифт) между общей производительностью наведения (ошибка в градусах, обратная) и объемом правого гиппокампа, измеренная с помощью сегментации ASHS. Один выброс исключен из этой диаграммы разброса, но результаты статистически не различались с включенным выбросом. Несмотря на численные различия, коэффициенты корреляции, полученные внутри каждой группы, статистически не отличаются друг от друга.Большие кружки обозначают средние значения по группе, а пунктирные линии обозначают стандартную ошибку ± 1 от среднего, рассчитанного внутри группы.
3.2. Анализ множественной регрессии с контролем
Мы хотели определить, существует ли связь между объемом правого гиппокампа и навигационными показателями после учета когнитивных и демографических факторов. Эти контрольные анализы особенно важны, потому что в некоторых (хотя и не во всех) предыдущих исследованиях учитывались возраст, пол и объем коры головного мозга. Чтобы учесть эти дополнительные источники неприятной дисперсии, мы провели несколько множественных регрессионных анализов, контролируя пол, возраст, вербальный IQ, мелкомасштабные пространственные способности и объем коры головного мозга.В частности, мы смоделировали общую ошибку наведения (и, в дополнительных моделях, ошибку наведения между маршрутами и внутри маршрута) как линейную комбинацию объема правого гиппокампа (или правого заднего гиппокампа) с MRT, WRAT, полом, возрастом и объемом коры. . Никакая комбинация регрессоров не привела к существенной связи между объемом гиппокампа и ошибкой наведения. Результаты моделей представлены в.
Таблица 1.
Множественные регрессионные контрольные анализы, оценивающие общую производительность наведения с объемом правого гиппокампа и правым задним объемом гиппокампа.
| Зависимая переменная | Переменная-предиктор | b | SE | t | P | R 2 905. R 2 | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Общее наведение (с общим объемом правого гиппокампа) | 0,21 | 0,15 906 906 906 906 постоянный 906 .09 | 0,14 | -0,64 | 0,52 | |||||||
| Пол (самец = 1) | 0,28 | 0,26 | 1,08 | 6 906 906 Общий объем гиппокампа-0,05 | 0,12 | -0,40 | 0,69 | |||||
| MRT | 0,30 | 0,11 | .83 | <0,01 | ||||||||
| WRAT | 0,22 | 0,11 | 2,09 | 0,04 | 16 | 0,15 | ||||||
| Объем мозга | 0,01 | 0,10 | 0,07 | 0,95 | общий объем вправо | 0.21 | 0,15 | |||||
| (константа) | -0,09 | 0,14 | -0,64 | 0,52 | ||||||||
| 906 | 906 | 1,07 | 0,29 | |||||||||
| Объем правого заднего гиппокампа | -0,05 | 0,11 | -0,46 | 0,65 | 906 906 906 | 0,11 | 2,90 | 0,006 | ||||
| WRAT | 0,22 | 0,11 | 2,08 | 0,04 906 906 906 | 0,04 906 906 906 906 | 1,43 | 0,16 | |||||
| Объем головного мозга | 0,01 | 0,13 | 0,04 | 0,97 |
Ваш комментарий будет первым